- Joined
- 27 December 2005
- Messages
- 16,454
- Reaction score
- 19,154
Placeholder for thread. Will post Foxhunter article later today.









flogger-23 said:does the audi tornado have the same foxhounter radar and avionics as the UK, or are the saudi one downgraded??
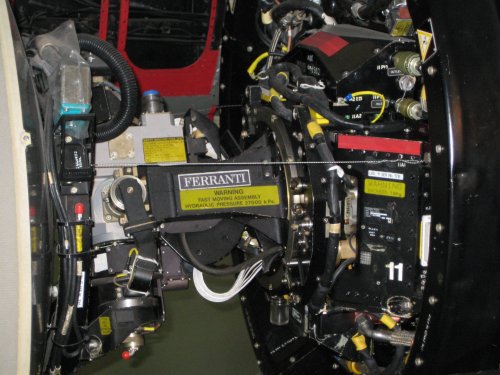
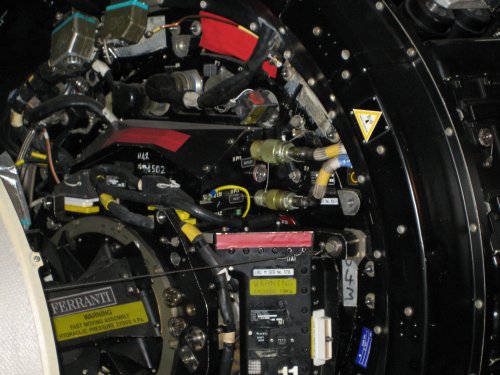
Source: Justin Reuter Tornado F3 - 25 Years of Air DefenceWe old F-4 mafia were looking forward to the new technology that the "Foxhunter" was reportedly offering. It had a magic method of giving range in Pulse Doppler called Frequency Modulated Interrupted Continuous Wave (FMICW). It soon became known by a slightly different nomenclature, however - F*M*I*C*W*! Rumours had reached all of us about the state of the F2 radar, more specifically, the lack of one. In fact, stories in the aviation press had started to label the radar in the F2 as the "Blue Circle" (after Blue Circle Cement), due to the fact, that in order to maintain the aircraft's centre of gravity, it was thought that all the F2s were required to carry "ballast" where the radar should have been.
Whilst this was partially correct, most of the F2s were fitted with a radar, the" Y" List AI-24. This was a pre-production radar, which was fitted to the
aircraft to at least give the new crews an insight of what to expect! What we saw did not impress us very much. I would go as far as to say we were all shocked - if this was what we were going to get, then things needed to improve, a great deal. GEC Marconi made the AI-24; their previous adventure into Al radars had last been the Lightning AI-23 pulse radar!
There were other issues with the aircraft of course, but I will not dwell on those here. Suffice to say, action was instigated in order to attempt to rectify the situation. We were already due to get the first scheduled in-squadron version of the radar, the "W" List (I never did get an answer to why the "W" List came after the "Y" List). This duly came, and went, to be replaced by the "Z" List radar. This was to be the final version, which met all the requirements of the initial specification, supposedly! When it became clear that this was not the case, the Central Trials and Tactics Organisation, the predecessor to the Air Warfare Centre, instigated a trial, the purpose of which was to ascertain the deficiencies of the AI- 24, and associated systems. "Trial Bunbury" was conducted at RAF Coningsby. It involved a large number of sorties, consisting of relatively benign 1 v 1 intercepts, to Air Combat Manoeuvring sorties and large Composite Air Operations packages.
The results of this trial led directly to a "new" contract being signed with British Aerospace (BAE Systems as it is now known). This was known as the 395 FD Contract, meaning it was for £395 million and was the "Final Development". This would seek to improve the radar's capabilities in stages - first would come the Stage 1 variant, then the Stage 2, with improvements subsequently added to each, which were to meet the stated requirements. Nothing ever goes according to plan, and indeed this can be said of anything to do with the "Foxhunter". Over the following ten years other contracts were written, or hands shaken, leading to the Stage 2G*, Stage 2H and finally the Stage 3. The "G" stood for the incorporation of the modifications added during Operation GRANBY - the first Gulf War.
During this period, the F2 was reaching the end of its useful life. As the F3 started to trickle into service, the F2s were delivered to St Athan for storage, neverto be seen again - at least not totally intact. On one occasion, upon giving the F700 to the engineers at St Athan, we were told that the said F2 had 300 hours on it, but had consumed 9.9 Fl (Fl is Fatigue Index, w ith an aircraft usually having a total lifespan of 100 Fl). We pretended to be shocked, but really had to laugh when he informed us that a GR1 had just been delivered for upgrade - it had 1000 hours on the clock, and had used 4.5 Fl. Need I say any more?!
Anyway, I digress. Now operating the mighty F3, there was nothing stopping us - oh, hold on, the radar! To say that the OC o f the F3 Operational Evaluation Unit (OEU) at the time was a genius would be an understatement. The debt the RAF and F3 community owes to him is immense.
Under his leadership, the OEU was able to start a programme of trials, that were, eventually, able to guide industry and the MOD Procurement Executive, (which was the predecessor to the Defence Procurement Agency, and then the Defence Equipment and Support Organisation) into making the appropriate decisions and modifications required. An excellent working relationship was established with GEC Marconi and British Aerospace, with a permanent detachment of personnel from these companies established at the OEU.
Over a number of years, personnel came and went. In fact, Ian Ansell, aka "Ferret", came and went a number of times. Ferret worked for GEC at the time and is a legend within the F3 radar community, and rightly so. Along with the then Gp Capt Development, he was responsible for kick-starting the "Foxhunter" recovery. On my arrival at the OEU I was briefed by the OC that "if I saw Ferret plugged into the side of an F3 with his Psion computer, I was to give him a kick in the butt, as he was probably changing the functionality of the Radar Data Processor, or something else nefarious". Over the years, the OEU had many dedicated aircrew, all worked extremely hard to fix a number of "issues", and help to make a "silk purse out of a sow's ear".
There is no doubt that the groundcrew, specifically the avionics specialists, the "fairies", played a significant part in the "Foxhunter" story. Their dedication in fixing the vagaries of the radar were appreciated by all those aircrew that came back to base declaring "ZululO "(the serviceability brevity code for "radar unserviceable"). Although, I suspect, that some aircrews'debriefs were viewed w ith suspicion, this loyal ban'd of fairies would nod sagely, and endeavour to push "**** uphill", in order to give the next wave a serviceable beast!
story ends, some 26 years after the RAF took delivery o f the first "Foxhunter" radar. It has seen several iterations, culminating in the Stage 3 variant. There have been frustrations along the way. Ultimately, however, those that have had the privilege to operate the "Foxhunter", know that, if handled in the right manner, it gave tremendous service. Today's radars, w ith all the new modern Micro Mechanical Electro Systems and other technologies available, should be streets ahead of the"Foxhunter", however, when it worked, it could give many of these systems a run for their money.
At the end of its life, when operated efficiently, the "Foxhunter" was capable of holding its own amongst other fighters, operating modern Active Electronically Scanned Array/Phased-Array radars, whilst supporting active air-to-air missiles, in a high threat environment - as its last visit to Exercise Red Flag ably demonstrated. Will it be remembered as a "classic"? I doubt it, but it will certainly be remembered.
Sqn Ldr Colin "Wiki" Wills