
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Eurocopter X3 high speed helicopter
- Thread starter hesham
- Start date
Matej
Multiuniversal creator

HeavyG
ACCESS: Confidential
- Joined
- 21 August 2009
- Messages
- 80
- Reaction score
- 18
From the Flight International website:
Eurocopter's answer to the Sikorsky X2 pusher or Bell-Boeing V22 Osprey tiltrotor is the H3 - High-speed Hybrid Helicopter - concept, which features a five-blade main rotor for vertical lift and single propellers mounted to short fixed wings either side for speed, with Eurocopter promising sustained cruise at more than 220kts.
More at the link: http://www.flightglobal.com/articles/2010/09/27/347852/pictures-eurocopter-unveils-high-speed-hybrid-helicopter.html
Eurocopter's answer to the Sikorsky X2 pusher or Bell-Boeing V22 Osprey tiltrotor is the H3 - High-speed Hybrid Helicopter - concept, which features a five-blade main rotor for vertical lift and single propellers mounted to short fixed wings either side for speed, with Eurocopter promising sustained cruise at more than 220kts.
More at the link: http://www.flightglobal.com/articles/2010/09/27/347852/pictures-eurocopter-unveils-high-speed-hybrid-helicopter.html
Attachments


Matej
Multiuniversal creator


- Joined
- 16 April 2008
- Messages
- 9,608
- Reaction score
- 14,502
The press releases have been rather coy about how the engines and propellers/rotors are actually linked up. I see Eurocopter touting this as a less complex alternative to Sikorsky's X2, and I'm wondering if they simplified by using one engine for the rotor and a separate one for the props. Given that the engines used in the X3 demonstrator (RTM 322) are at least twice as powerful as those in the original EC155 airframe (Arial 2C2), I think it's quite possible that they separated the two drivetrains entirely. Simpler, certainly, but much less efficient from a weight perspective.
Matej
Multiuniversal creator
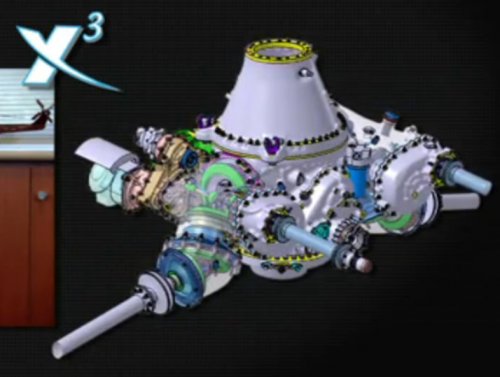
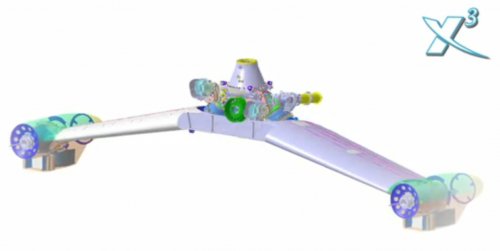
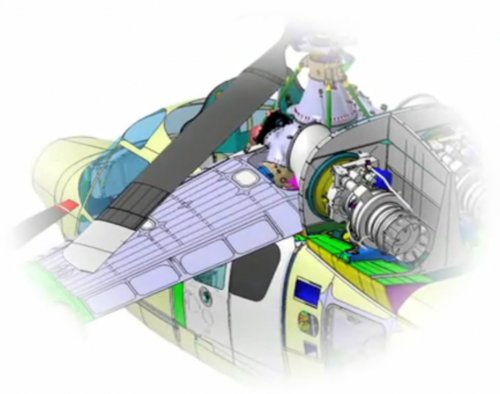
Nice, simple and clever design. Marketing of the new vehicle is horrible (as always in the Europe). Here are some stills from the video. BTW, noteworthy is the wing oscillation during the flight.
Attachments

Demon Lord Razgriz
ACCESS: Confidential
- Joined
- 31 October 2008
- Messages
- 188
- Reaction score
- 14
Comparing it to the X2 designs, this X3 seems to be forgetting a key detail in the X2 design. X2 has a coaxial tandem rotor, which negates the primary problem with single rotors at high speed losing lift on one side. And I doubt those stub wings will generate much lift with the rotor disrupting the air flow over them.
From a glance, it seems that the X2 trumps the X3 rather handedly IMHO.
From a glance, it seems that the X2 trumps the X3 rather handedly IMHO.

Matej
Multiuniversal creator
Demon Lord Razgriz said:Comparing it to the X2 designs, this X3 seems to be forgetting a key detail in the X2 design. X2 has a coaxial tandem rotor, which negates the primary problem with single rotors at high speed losing lift on one side.
Which is why they are slowing it down. Watch the video.
BTW, don't forget that this is only the first first flight this year from the two announced. If the second "first flight" happens, than it will leave us four remaining...
Attachments
Anderman
ACCESS: Secret
- Joined
- 30 September 2006
- Messages
- 257
- Reaction score
- 190
F-14D said:The Fairey Rotodyne (more or less) flies again!
If i understand the concept correctly it is more like the Lockheed AH-56 or the Sikorsky S-66 concept
http://www.secretprojects.co.uk/forum/index.php/topic,941.0/highlight,ah-56.html
- Joined
- 4 May 2008
- Messages
- 2,439
- Reaction score
- 762
I would extend comparisons to the even earlier Fairey Gyrodyne (spell check?). This may not fly as fast as a tiltrotor or even the X2, but there is much to commend in experimenting with something that is relatively low-risk and still delivers respectable performance.
- Joined
- 3 October 2007
- Messages
- 1,960
- Reaction score
- 1,197
AeroFranz said:I would extend comparisons to the even earlier Fairey Gyrodyne (spell check?). This may not fly as fast as a tiltrotor or even the X2, but there is much to commend in experimenting with something that is relatively low-risk and still delivers respectable performance.
But if you don't get a substantial jump, then this becomes an expensive and somewhat complex (the differential propeller thrust for anti-torque) to do things. More power to them,anything that advances rotor craft technology is to be encouraged, but if Sikorsky can get their concept to work to expectations, I think they've got a better idea.
- Joined
- 2 August 2006
- Messages
- 3,256
- Reaction score
- 1,528
I think this concept, the X^3, is a more near term concept than the X2. However, if all of the X2 technology works out, I think it is the better solution in the long term.
The one major advantage I give the X2 tech, at least in terms of military applications, is troops can enter and exit side doors directly without having to worry about walking into propellers and, IIRC, the X2's tail propeller is disengaged when on the ground.
Still, it is cool to see this flying. It would be interesting to see them apply it to something larger or see Boeing do it on a Chinook. In fact, isn't there a Chinook concept that was similar in design?
The one major advantage I give the X2 tech, at least in terms of military applications, is troops can enter and exit side doors directly without having to worry about walking into propellers and, IIRC, the X2's tail propeller is disengaged when on the ground.
Still, it is cool to see this flying. It would be interesting to see them apply it to something larger or see Boeing do it on a Chinook. In fact, isn't there a Chinook concept that was similar in design?
Demon Lord Razgriz
ACCESS: Confidential
- Joined
- 31 October 2008
- Messages
- 188
- Reaction score
- 14
Hmm... Dunno if it's just me, but from the sound of it in that vid, it's more complex than the X2, which is just a coaxial tandem rotor heli with a pusher prop.
HeavyG
ACCESS: Confidential
- Joined
- 21 August 2009
- Messages
- 80
- Reaction score
- 18
Personally, I think the X2 is the less complex project. Kamov has been working with contra-rotating main rotors for years and Sikorsky helped get the kinks out with the XH-59 ABC program.
Speaking of compound helicopters, anyone remember the Piesecki X-49A Speedhawk? Piesecki's solution of using a configurable rear fan to provide both forward thrust and torque control seems to work well. Piesecki has been working on various versions of this over the years, especially with the Pathfinder helicopters.
Speaking of compound helicopters, anyone remember the Piesecki X-49A Speedhawk? Piesecki's solution of using a configurable rear fan to provide both forward thrust and torque control seems to work well. Piesecki has been working on various versions of this over the years, especially with the Pathfinder helicopters.
Attachments

- Joined
- 4 May 2008
- Messages
- 2,439
- Reaction score
- 762
The CAD pics posted by Matej show two engines. Three engines is a non-starter, IMHO. Too expensive, unless you are flying much larger military machines that might justify it, like a CH-53. For the civilian market? No way. This is something that makes me skeptical about the otherwise very neat Piasecki X-49. We are going back to the dedicated cruise engine, increasing empty weight, cost, and cutting into payload.
I agree the X-2 seems to have the better solution, with higher speed potential. But there is much to commend in Eurocopter's approach. They could not rely on the wealth of data gathered by sikorsky on the various LHX/ABC programs, yet they litterally cobbled the thing together using parts they had lying around, got the thing in the air without spending a fortune (my guess) and it most likely works.
This is to me the classic 80/20 engineering dilemma. Getting the last 20 percent of performance is going to take 80% of the time (and $). Is this as good as X-2? probably not. Is it vastly better than the sorry lack of progress witnessed in the past 40 years in rotary wing technology? probably.
The measure of the success of the two formulas will only be appreciated when the respective companies start selling developed machine to armed forces and civilian operators.
I agree the X-2 seems to have the better solution, with higher speed potential. But there is much to commend in Eurocopter's approach. They could not rely on the wealth of data gathered by sikorsky on the various LHX/ABC programs, yet they litterally cobbled the thing together using parts they had lying around, got the thing in the air without spending a fortune (my guess) and it most likely works.
This is to me the classic 80/20 engineering dilemma. Getting the last 20 percent of performance is going to take 80% of the time (and $). Is this as good as X-2? probably not. Is it vastly better than the sorry lack of progress witnessed in the past 40 years in rotary wing technology? probably.
The measure of the success of the two formulas will only be appreciated when the respective companies start selling developed machine to armed forces and civilian operators.
Matej
Multiuniversal creator
AeroFranz said:I agree the X-2 seems to have the better solution, with higher speed potential. But there is much to commend in Eurocopter's approach. They could not rely on the wealth of data gathered by Sikorsky on the various LHX/ABC programs, yet they litterally cobbled the thing together using parts they had lying around, got the thing in the air without spending a fortune (my guess) and it most likely works.
Exactly. When we are evaluating the X3 model, we must definitely consider, that it is NOT production nor pre-production model. It is technology demonstrator - nothing less, nothing more. To save the money, Eurocopter made the smart decision and used as much available parts as possible: Dauphin fuselage, EC-155 rotor or EC-175 gearbox. But because the vehicle itself looks much usable, compared to purely technological demonstrator X2, it seems to me, that there is the growing tendency to evaluate it as the final product. It is not!
Other important difference is that while the Eurocopter X3 and X4 demonstrators are aimed primarily to the civil applications (mainly Dauphin family radical upgrade - because of the lowering orders of the type), in the same time we saw the applications for the technology, developed by Sikorsky X2, in the military field.
The small note: X-49 torque force is eliminated by the big moving surfaces inside the duct, that are changing the direction of the air flow. But how it works on the X3? The different thrust of the propellers on the each side?
- Joined
- 16 April 2008
- Messages
- 9,608
- Reaction score
- 14,502
While the X-49A (and the notional SpeedHawk production version) has a third engine to drive the pusher, that would not absolutely necessary for other aircraft in that general configuration. I can't see any reason you couldn't have the prop driven off the same transmission that feeds the rotor (a la X2 and X3).
- Joined
- 16 April 2008
- Messages
- 9,608
- Reaction score
- 14,502
Matej said:The small note: X-49 torque force is eliminated by the big moving surfaces inside the duct, that are changing the direction of the air flow. But how it works on the X3? The different thrust of the propellers on the each side?
Yep, differential thrust is used for counter-torque in X3.
- Joined
- 3 October 2007
- Messages
- 1,960
- Reaction score
- 1,197
As a side note, that also belongs in another topic, Sikorsky hit their 250 knot goal for the X2 last week. Do not know whether this was a dash or a cruise. Since they had a 20% power margin left, they're going to try for 265.
Matej
Multiuniversal creator
Eurocopter just released a set of high-res photos: http://www.eurocopter.com/site/en/ref/Photos_1100.html#/content/RUB_1100/ Now I am much satisfied.
Matej
Multiuniversal creator
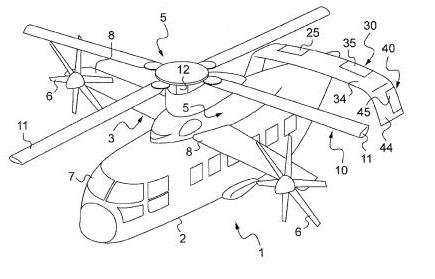
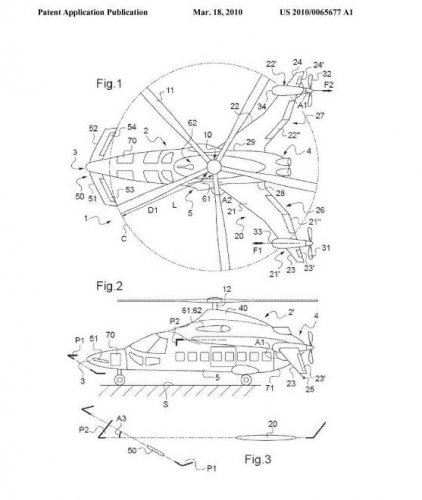
Its the Eurocopter patent, filled in the US at the beginning of 2010. That are the facts. Now the speculation is, what it represents - it is believed, that it represents the X4 shape. Wait until the end of the year. Originally, both X3 and X4 demonstrators were announced for the third quarter of the 2010, but the X4 suffered some delays because of the funding from the French government. However Eurocopter wants to present both demonstrators on the next Heliexpo.
- Joined
- 4 May 2008
- Messages
- 2,439
- Reaction score
- 762
Matej said:The small note: X-49 torque force is eliminated by the big moving surfaces inside the duct, that are changing the direction of the air flow. But how it works on the X3? The different thrust of the propellers on the each side?
This was already addressed, but as a side note, the Fairey Gyrodyne used the same system 60 years ago. I believe BOTH incarnations did, since besides an asymmetrical Gyrodyne, there was also a "Jet Gyrodyne" with props on both sides. I wonder how the required power compares with a standard anti-torque tail rotor, since the moment arm is much smaller. You do have two props, though...
TomS said:While the X-49A (and the notional SpeedHawk production version) has a third engine to drive the pusher, that would not absolutely necessary for other aircraft in that general configuration. I can't see any reason you couldn't have the prop driven off the same transmission that feeds the rotor (a la X2 and X3).
They are probably trying to keep the Blackhawk as unmodified as possible (until recently they were not allowed to exceed the rated Vmax for the unmodified helicopter), hence the need for the other engine. I don't think they had much of a choice, but using a draggy airframe is a power hog. It's crazy to drag an unfaired gear and rotor head at 200+ kts. I believe aerodynamic changes are on the way.
Machdiamond
ACCESS: Secret
- Joined
- 15 January 2007
- Messages
- 325
- Reaction score
- 35
The X4 concept has some potential and I can see how the X3 can serve as technology testbed because in itself I personally think the Sky normally repels to the ground objects as ugly and goofy as the X3.
Demon Lord Razgriz said:Comparing it to the X2 designs, this X3 seems to be forgetting a key detail in the X2 design. X2 has a coaxial tandem rotor, which negates the primary problem with single rotors at high speed losing lift on one side. And I doubt those stub wings will generate much lift with the rotor disrupting the air flow over them.
"What is new on the X3 is that Eurocopter appears to be using differential power/pitch on the props to counter torque instead of a tail rotor or fantail. That looks like the big difference between X3 and the compound helos of the 1960s. Both the props and the rotor appear to be driven off a common transmission by the two turboshaft engines.
How does this compare to the US solution, the tilt-rotor? Bad news: You still have the old compound-helo problem of driving the rotor sideways through the sky, which may result in efficient cruise speed capping out at a lower figure. "
Following are the comments of Bill Sweetman on the Aviation Week ARES Blog. Pardon my ignorance, so does it mean that the X3 has to sacrifice power to counter the torque problem and any compound helicopter (including the X-49) will have a similar problem? I was always under the impression that the wings would offload the rotor at high speed and power dedicated to any torque cancellation would be reduced.
amsci99 said:Demon Lord Razgriz said:Comparing it to the X2 designs, this X3 seems to be forgetting a key detail in the X2 design. X2 has a coaxial tandem rotor, which negates the primary problem with single rotors at high speed losing lift on one side. And I doubt those stub wings will generate much lift with the rotor disrupting the air flow over them.
"What is new on the X3 is that Eurocopter appears to be using differential power/pitch on the props to counter torque instead of a tail rotor or fantail. That looks like the big difference between X3 and the compound helos of the 1960s. Both the props and the rotor appear to be driven off a common transmission by the two turboshaft engines.
How does this compare to the US solution, the tilt-rotor? Bad news: You still have the old compound-helo problem of driving the rotor sideways through the sky, which may result in efficient cruise speed capping out at a lower figure. "
Following are the comments of Bill Sweetman on the Aviation Week ARES Blog. Pardon my ignorance, so does it mean that the X3 has to sacrifice power to counter the torque problem and any compound helicopter (including the X-49) will have a similar problem? I was always under the impression that the wings would offload the rotor at high speed and power dedicated to any torque cancellation would be reduced.
The X3 wing increases the empty weight and thereby reduces the useful load (fuel and payload). It's in the way of the rotor in a hover, reducing rotor lift and thereby reducing useful load. The propellers aren't on as long a moment arm as a tail rotor, requiring more thrust for anti-torque, reducing hover performance. You're correct that not much anti-torque is required in cruise with the rotor in autogiro or zero thrust mode but the drag of the rotor and complications for handling qualities are still present. Using a common power plant for both lift and thrust is an improvement and propellers instead of jets will provide some empty weight and cruise efficiency improvement compared to the "high-speed" compound helicopters of the 1960s, but my guess is that going faster will still hurt both range and payload to an unacceptable degree as it did even more so then. The Sikorsky X2 has an advantage in hover (no wing download, no power-robbing anti-torque) but the disadvantage of having the drag of two rotors in forward flight, assuming that Sikorsky has in fact solved the horrific XH-59 vibration problem.
- Joined
- 4 May 2008
- Messages
- 2,439
- Reaction score
- 762
hmmm..I'm curious about the lack of wings on the X-2. I'm not saying that it needs them, there are the aforementioned increases in Wempty and download in hover, but doesn't offloading the rotor delay some of the compressibility problems at the tips (because of lower CL requirements)?
I'm trying to figure out what is being traded here by having it or not.
I'm trying to figure out what is being traded here by having it or not.
- Joined
- 3 October 2007
- Messages
- 1,960
- Reaction score
- 1,197
AeroFranz said:hmmm..I'm curious about the lack of wings on the X-2. I'm not saying that it needs them, there are the aforementioned increases in Wempty and download in hover, but doesn't offloading the rotor delay some of the compressibility problems at the tips (because of lower CL requirements)?
I'm trying to figure out what is being traded here by having it or not.
In the X2, the rotor is slowed at higher speeds to address this issue. The main functions on an ABC helo of small to medium size would be as a place to hang things, as in the AH-1, AH-64 and H-60 External Support Stores System (ESSS). On a large transport vehicle, wings may serve to enhance rolling takeoffs with a large overload, or to hang auxiliary propulsion as in some of Sikorsky's' JHL proposals. On a large transport, hovering efficiency may not be as important (although it would be on a large crane).
If you don't need to do the things I just mentioned, the weight of hauling around the wing and the efficiency loss argue against having one. That was always one of the problems with compound helicopters.
AeroFranz said:hmmm..I'm curious about the lack of wings on the X-2. I'm not saying that it needs them, there are the aforementioned increases in Wempty and download in hover, but doesn't offloading the rotor delay some of the compressibility problems at the tips (because of lower CL requirements)?
I'm trying to figure out what is being traded here by having it or not.
Offloading the rotor with the wing doesn't solve the compressibility problem as much as not needing the lift means you can reduce the rotor rpm to keep the advancing tip from approaching its critical Mach number. One of the benefits of the ABC is that you can slow the rotors down for high speed flight but also get lift from the rotors and not worry about retreating blade stall. One of the implications of using the slowed rotor for lift is that the structures guys have to deal with a wider range of rotor rpm from a vibration standpoint.
- Joined
- 16 April 2008
- Messages
- 9,608
- Reaction score
- 14,502
amsci99 said:Demon Lord Razgriz said:Comparing it to the X2 designs, this X3 seems to be forgetting a key detail in the X2 design. X2 has a coaxial tandem rotor, which negates the primary problem with single rotors at high speed losing lift on one side. And I doubt those stub wings will generate much lift with the rotor disrupting the air flow over them.
"What is new on the X3 is that Eurocopter appears to be using differential power/pitch on the props to counter torque instead of a tail rotor or fantail. That looks like the big difference between X3 and the compound helos of the 1960s. Both the props and the rotor appear to be driven off a common transmission by the two turboshaft engines.
How does this compare to the US solution, the tilt-rotor? Bad news: You still have the old compound-helo problem of driving the rotor sideways through the sky, which may result in efficient cruise speed capping out at a lower figure. "
Following are the comments of Bill Sweetman on the Aviation Week ARES Blog. Pardon my ignorance, so does it mean that the X3 has to sacrifice power to counter the torque problem and any compound helicopter (including the X-49) will have a similar problem? I was always under the impression that the wings would offload the rotor at high speed and power dedicated to any torque cancellation would be reduced.
Any rotorcraft with a single rotor will lose some power to counter torque (and ones with counter-rotating rotors have other efficiency losses, which is why coaxial isn't a slam dunk choice over top-and-tail rotor). But you're right that the power lost will be less as the rotor is unloaded and slowed, since a slower rotor generates less torque to be countered.
Sweetman's point is that compounds have the issue of drag from the rotor even when their are being propelled primarily by a propeller or jet. But I'm annoyed to see tilt-rotor called "the US solution" since there are plenty of US non-tiltrotor concepts (X2, X-49, Canard-rotor-wing, etc) and one European company is signed up to tiltrotor (Augusta and the Model 609).
- Joined
- 3 October 2007
- Messages
- 1,960
- Reaction score
- 1,197
TomS said:But I'm annoyed to see tilt-rotor called "the US solution" since there are plenty of US non-tiltrotor concepts (X2, X-49, Canard-rotor-wing, etc) and one European company is signed up to tiltrotor (Augusta and the Model 609).
I think what was meant was that the US developed Tilt-Rotor, and while the US has and has had a number of concepts and demonstrators (still holder of the World Record for unsuccessful V/STOL projects!), that's the only non-helo powered lift vehicle to make it into production.
- Joined
- 4 May 2008
- Messages
- 2,439
- Reaction score
- 762
Tailspin Turtle said:Offloading the rotor with the wing doesn't solve the compressibility problem as much as not needing the lift means you can reduce the rotor rpm to keep the advancing tip from approaching its critical Mach number. One of the benefits of the ABC is that you can slow the rotors down for high speed flight but also get lift from the rotors and not worry about retreating blade stall.
Oh, ok. I guess that's different but related to what I meant. Both operating CL and tip speed affect compressibility onset (I am working from fixed wing theory here, hope this is valid for rotors too). The two are related by the amount of thrust to be generated. I am not sure which is more effective in building a margin on compressibility, whether to keep RPM constant and use a lower rotor CL (thanks to wing generated lift) or viceversa.
- Joined
- 1 May 2007
- Messages
- 2,596
- Reaction score
- 1,965
I wonder how the required power compares with a standard anti-torque tail rotor, since the moment arm is much smaller.
From Putnam's 'Fairey', page 389 :-
"[In the Gyrodyne]...except when hovering or in slow-speed flight, the greater part of the available power went to the propellor. So that this could provide propulsive power while retaining it's use for anti-torque and slow-speed yaw control, it was moved from the tail to an equivalent azimuthal location at the end of the starboard stub-wing, where it was still far enough from the axis of the rotor to absorb minimum power when used for control in yaw." [my bold]
I take the point about the extra wing structure reducing the available payload weight, but I would have thought that this would be offset somewhat by the use of a more lightly constructed tail cone and empennage, as this no longer has to carry the weight/loads of the tail rotor, gearboxes, and shafting.
Also, I believe in this class of aircraft, it is a conscious decision on the part of the designers to sacrifice some payload in exchange for cruising speed, that is, this configuration would not be used when maximum load-carrying capability is essential.
... troops can enter and exit side doors directly without having to worry about walking into propellers ...
an X3 type can have full-width tail loading ramp away from the propellors...
cheers,
Robin.
AeroFranz said:Tailspin Turtle said:Offloading the rotor with the wing doesn't solve the compressibility problem as much as not needing the lift means you can reduce the rotor rpm to keep the advancing tip from approaching its critical Mach number. One of the benefits of the ABC is that you can slow the rotors down for high speed flight but also get lift from the rotors and not worry about retreating blade stall.
Oh, ok. I guess that's different but related to what I meant. Both operating CL and tip speed affect compressibility onset (I am working from fixed wing theory here, hope this is valid for rotors too). The two are related by the amount of thrust to be generated. I am not sure which is more effective in building a margin on compressibility, whether to keep RPM constant and use a lower rotor CL (thanks to wing generated lift) or viceversa.
You have to slow the rotor down at high speeds with either a compound or ABC approach. For example, the S-76 rotor-tip speed is 725 fps. The speed of sound at sea level is about 1,126 feet per second. At a cruise speed of 150 knots the combination of airspeed and tip speed means the tip is moving at 978 fps, or Mach .87, beginning to push drag divergence and therefore requiring increasing torque to maintain rotor rpm and experiencing increased pitch link loads.
Slowing a rotor for high speed flight will eventually result in an inability to generate any lift from the retreating blade. To oversimplify, the compound (winged) helicopter basically operates with the rotor in flat pitch at high speed with most of the lift provided by the wing, not the rotor, so there is no roll control problem. The ABC avoids the roll problem because lift is being provided by the advancing blade on each side and the retreating blade is not being asked for any.
Retrofit
ACCESS: Top Secret
- Joined
- 21 February 2007
- Messages
- 656
- Reaction score
- 338
What about the other side of the flight enveloppe: Hovering (and maneouvrability in hovering).
How a co-axial rotor (X2) or a tilt-rotor (Bell-Boeing V-22) behave vs a single rotor + tail rotor or, in the X3 case, a single rotor + lateral differiential propellers?
How a co-axial rotor (X2) or a tilt-rotor (Bell-Boeing V-22) behave vs a single rotor + tail rotor or, in the X3 case, a single rotor + lateral differiential propellers?
Similar threads
-

-
-

-
China's advanced high-speed helicopter project Jueying-8
- Started by antigravite
- Replies: 4
-