The Russian aircraft manufacturer is pursuing attack and logistics UAV concepts that have evolved because of the war in Ukraine.
aviationweek.com
Sukhoi has received approval from the Russian Defense Ministry to begin producing the S-71 air-launched UAV, which has undergone significant design changes based on lessons from the Russia-Ukraine conflict. There are two versions of the S-71: the S-71K "Kovyor," which operates like a guided air-to-ground missile, and the more advanced S-71M "Monokhrom," which is an autonomous UAV.
The design changes to the S-71 have focused on increasing range and reducing radar cross-section to improve survivability against air defenses. The original multimission design was simplified for easier mass production. The S-71 began captive-carry trials in April 2024 at Russia’s flight research center in Zhukovsky, with test flights involving the Su-57 fighter.
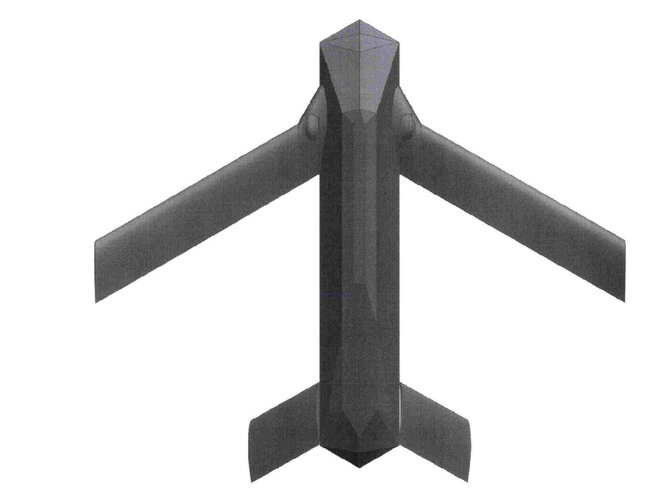
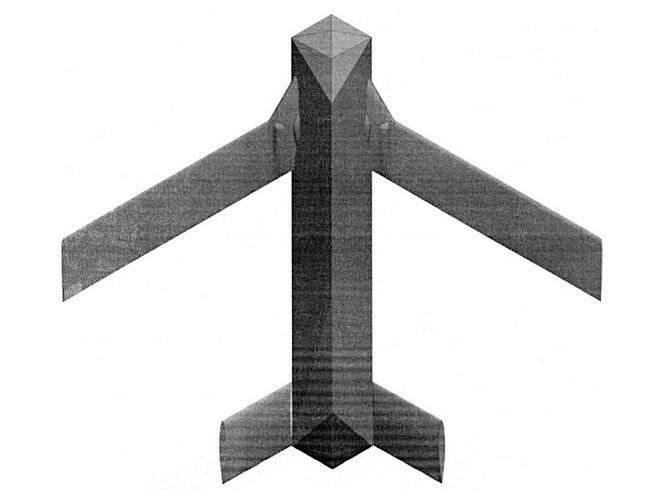
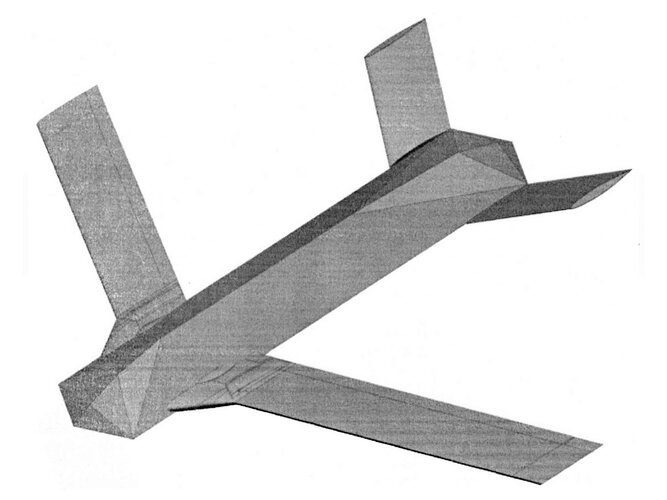
The S-71 has a trapezoidal fuselage for stealth, a foldable swept wing, and inverted V-shape fins, powered by a TRDD-50 turbofan engine. It can reach speeds of Mach 0.6 and altitudes of up to 8,000 meters.
The S-71K deploys cluster munitions, while the S-71M features electro-optical sensors for day and night operations, with capabilities for target detection and engagement. The S-71M can be guided by an operator to validate targets or guide weapons. It offers multiple warhead options, including high-explosive and shaped charges. The S-71K is externally carried by launch aircraft, while the S-71M can also be housed in the weapons bay of an Su-57 or S-70 Okhotnik UAV.
Does it land on its own? If so, then calling it an uav might not be as much of a stretch.
But if it's essentially an one way ticket air craft, then it's really a missile or a powered recon/ multipurpose container.
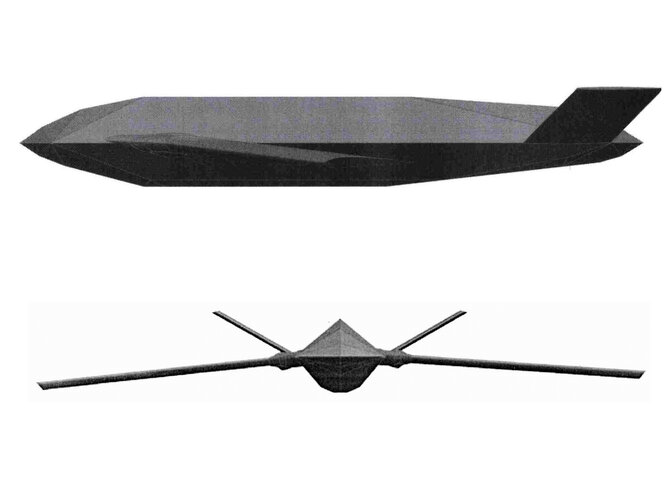
Kinda hard to imagine how that thing lands. Anyway i got myself some preliminary model.. i think. Based on patent and observed hardware. Some speculation tho on the inlet. As no internal layout or drawings available. At the moment, the inlet has no engine but instead the engine face is considered a flat plate.
No Radar absorbers assumed.
For comparison it will be JASSM, Storm Shadow and Kalibr.
Now the result :
Thise depict the interaction between the model and some frequencies. I modeled from VHF down to Ka-Band. However the other missiles used as comparison, didnt got that far. Thus the result will only be displayed in numerical form down to 12 GHz.
One can easily notice the apparent large "lobe" at the dorsal of the missile. That's from the inlet and the flat plate engine face.
As for the numerical result.
The S-71 form seems to be promising, mainly in high frequency regime, while in low VHF it has higher signatures compared to JASSM, Storm Shadow and Kalibr. The RCS however dropped sharply at L-band down to X, where it's lower than all the other missiles. Which about 0.01 sqm vs 0.05 and 0.04 for Storm shadow and JASSM respectively.
Looks IMO more like a munition dispenser or LRCM but not really an UAV/UCAv-carrier ... as such indeed like JASSM, Storm Shadow and the new Chinese KF-98A
It´s probably really light at the end of the mission. You can see how the engine nozzle and inlet are tiny. I would not be surprised if it just belly land in a grass field like many small UAS. At worst, a parachute should do the trick.
Aren´t the patent image confusing? My intuition would tell that this UAV rolls 180degree after launch with the wing shoulder mounted.
1. An air-launched unmanned aerial vehicle designed to engage a wide range of operational intelligence data of stationary and moving objects in counteraction conditions with automatic recognition of the target type and decision-making on its engagement, comprising a fuselage containing a warhead, a middle section, a tail section, a power plant, a power plant nozzle, a power plant air intake, a swept wing, a twin-fin all-moving tail unit, a warhead located inside the fuselage, an optical system, navigation system sensors and an onboard intelligent search and guidance system based on trained neural networks.
2. An air-launched unmanned aerial vehicle according to paragraph 1, in which the fuselage in cross-section has a substantially trapezoidal shape with the sides “tilted” inward relative to the plane of symmetry of the unmanned aerial vehicle.
3. An air-launched unmanned aerial vehicle according to paragraph 1, in which the twin-fin all-moving tail is inclined at an angle relative to the plane of symmetry of the unmanned aerial vehicle.
4. An air-launched unmanned aerial vehicle according to claim 1, wherein the optical system comprises a camera operating in the visible wavelength range, or a camera operating in the infrared wavelength range, or a system of cameras operating in both the visible and infrared wavelength ranges.
5. An air-launched unmanned aerial vehicle according to paragraph 1, in which the warhead is a high-explosive charge, a high-explosive fragmentation charge, or a cumulative charge.
6. A method of using an air-launched unmanned aerial vehicle, including transporting the unmanned aerial vehicle on a sling point of a carrier aircraft, exchanging information between the unmanned aerial vehicle and an airborne command post or a mobile ground control post, launching the unmanned aerial vehicle to the line of combat contact, autonomous flight of the unmanned aerial vehicle along a route specified in the flight mission, entry of the unmanned aerial vehicle into a specified area, searching for targets during flight along a route specified in the flight mission or an independently constructed search route, transmitting information from the unmanned aerial vehicle's camera about detected and recognized targets in real time to the airborne command post or a mobile ground control post.
7. A method for using an air-launched unmanned aerial vehicle according to paragraph 6, during which, after detecting a target, the unmanned aerial vehicle independently makes a decision to hit the target in accordance with a target database and the corresponding target priority table.
8. A method of using an air-launched unmanned aerial vehicle according to paragraph 6, during which, after detecting a target, the operator makes a decision to hit the target.
The primary goal of the invention is to reduce the radar cross-section (RCS) of a combat UAV, thereby decreasing its detectability by enemy radar systems. This is achieved without using RAM or radar-absorbing coatings, addressing the following challenges:
• Prevent or delay detection by enemy radar.
• Force enemy radar to increase emission power, making it more detectable by passive electronic warfare systems.
• Prevent accurate target classification by reducing “bright spots” in radar reflections.
• Reduce the power needed for electronic countermeasures to protect the UAV.
• Minimize the weight of decoy reflectors used for masking.
• Avoid complex and expensive RAM application processes.
The patent emphasizes a monofunctional design, meaning the UAV is optimized for a single role (e.g., combat) with minimal sensors to simplify construction and reduce RCS.
Key Features of the UAV
The UAV incorporates several design elements to achieve low radar visibility:
1. Fuselage Design:
• The fuselage (1) is multifaceted with no rounded surfaces to minimize radar reflection.
• Rounded surfaces (e.g., cylindrical or conical) are avoided because they produce consistent radar reflection peaks that cannot be redirected outside the protected sector.
• The angle of each facet’s normal (perpendicular line) is designed to be greater than the angle defining the protected sector, ensuring radar reflections are directed away from critical detection angles.
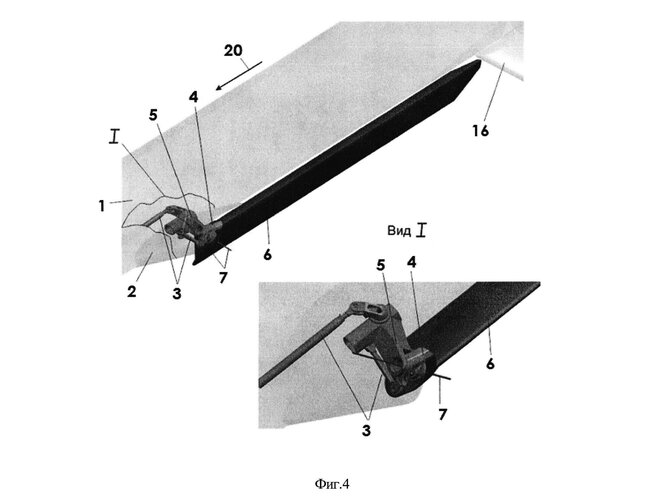
2. Air Intake (4):
• Positioned at the rear of the fuselage with a tilt toward the rear hemisphere.
• Located on a skewed surface (5) to reduce geometric visibility from forward angles, minimizing radar reflections from the air intake.
• Without RAM, the air intake channel acts as a waveguide for electromagnetic waves, so its placement avoids direct radar exposure.
3. Seamless Coating:
• The fuselage coating is seamless to eliminate gaps that could scatter radar waves.
• Joints between components (e.g., fuselage-wing, fuselage-empennage) are covered with current-conducting fabric (e.g., “Polet” fabric) and sealed with current-conducting glue (e.g., NTK glue).
• This creates an electromagnetically uniform surface, reducing radar scattering caused by seams.
4. Minimal Sensors:
• The UAV has a maximum of two sensors for interaction with the environment (e.g., navigation or communication).
• Reducing sensors minimizes surface irregularities, hatches, and joints, which contribute to RCS.
• Multiple sensors increase uncontrolled radar reflection peaks due to interactions with the UAV’s surface and other components.
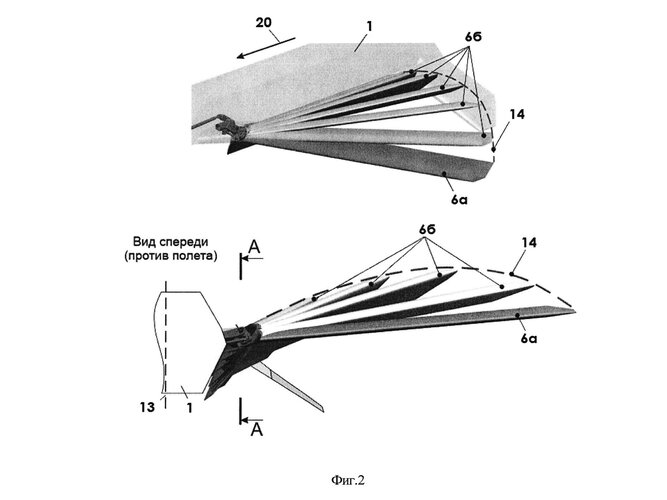
5. Wings (2) and Empennage (3):
• Designed to align with the stealth principles of the fuselage, with edges and surfaces oriented to redirect radar reflections.
• The sweep angle of wings and side edges is chosen to minimize the likelihood of prolonged radar exposure from critical angles.
6. Peak Alignment:
• Radar reflection peaks from edges (e.g., wing edges, side ribs) are spatially aligned into narrow angular sectors (2–3° wide) to reduce the number of detectable peaks.
• This spatial parallelism ensures that reflections from different surfaces overlap, reducing the overall RCS in the protected sector.
Claims
The patent includes two claims:
1. Claim 1: Describes the monofunctional stealth combat UAV with:
• A fuselage, power plant, air intake, wings, and empennage.
• A maximum of two environmental interaction sensors.
• An air intake at the rear of the fuselage, tilted toward the rear hemisphere and located on a skewed surface.
• A multifaceted fuselage with no rounded surfaces.
• A seamless fuselage coating, with joints covered by current-conducting fabric and glued with current-conducting adhesive.
2. Claim 2: Adds that the angle of each facet’s normal is greater than the angle defining the protected sector, ensuring radar reflections are redirected outside critical detection zones.
S-71M is a expendable UAV design to target high value mobile targets in concert with Su-57.
Kh-69 is a cruise missile designed to hit high value static targets. It follows a pre-programmed flight path with limited in-flight adaptability compared to a UAV.
S-71M is a expendable UAV design to target high value mobile targets in concert with Su-57.
Kh-69 is a cruise missile designed to hit high value static targets. It follows a pre-programmed flight path with limited in-flight adaptability compared to a UAV.
I could also imagine that the S-71 could be able to conduct reconnaissance and target designation as a UAV in future iterations. Essentially being a cross between a Kh-69, Lancet and Orlan in a sense. The ability to insert a stealthy ISR asset near or within contested air space seems rather useful and in line with the Su-57 being very much multirole focused.
I could imagine that making especially sense with the patented two seater version of the aircraft. Having the WSO coordinate S-70 and S-71 for strike and ISR missions. Letting the pilot and the aircraft as a whole fall further back and remain on the defensive and out of risk.
This site uses cookies to help personalise content, tailor your experience and to keep you logged in if you register.
By continuing to use this site, you are consenting to our use of cookies.

 aviationweek.com
aviationweek.com