
- Joined
- 25 June 2009
- Messages
- 13,941
- Reaction score
- 3,574
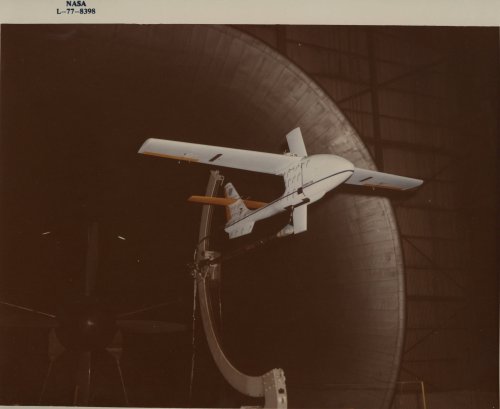
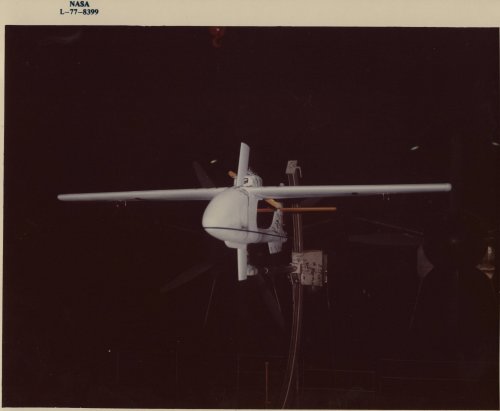
USAF's Flight Dynamics Laboratory FDL-33 electric RPV
an experimental aircraft developed to study flight control concept
The XBQM-106 (or XBQM-26) mini-RPV was a tail-stabilized, pusher-propellor aircraft that was designed and developed within the Flight Dynamics Laboratory (FDL) at Wright Patterson AFB. It was normally powered by a Herbrandson DH220, 18 HP, 2-cycle engine. The vehicle was widely used in research programs dealing with a variety of mini-RPV missions, most of which were oriented towards defense suppression and harassment. A limited number of these vehicles were manufactured "in house" at FDL, and the program included investigations into low-cost methods of fabrication. It is unclear if there was ever any intent to adopt the XBQM-26 for operational service, since the program had a strongly experimental flavor, with the different configurations used to evaluate a wide range of possibilities for tactical UAV operations. At any rate, the program was terminated on Oct. 1, 1982 with no prospects for the type to be produced or fielded for other military applications.
Nominal performance figures for this vehicle are as follows:
Gross take-off weight: 225 lb (102 kg)
S.L. optimum cruise speed: 61 knot (113 km/h)
S.L. max dash speed: 87.5 knot (162 km/h)
S.L. climb rate: 900 ft/min* (274 m/mmn)
Service ceiling: 10,000 ft* (3049 in)
Payload weight: 54 lb (24.5 kg)
Fuel capacity: 56 lb (25.5 kg)
*at mid weight of 180 lb
Adapted from REMOTE SENSING OF BATTLEFIELD WEATHER CONDITIONS
USING UNMANNED AIR VEHICLES and Wikipedia.
Beginning in 1975, the USAF's Flight Dynamics Laboratory (FDL) designed and built the FDL-33 series of small experimental RPVs under the designation XBQM-106, sometimes called Teleplane. The Teleplane vehicles tested several wing, nose, tail and engine configurations, and evaluated RPV equipment and technologies like a fluidic autopilot, seeker/warhead options for expendable strike missions, light-weight composite construction and low-observables (stealth) technology.
The XBQM-106 vehicles were relatively small drones powered by a low-power piston engine driving a pusher propeller. The first vehicles had a McCulloch MC-101 engine, but most of the later ones used a Herbrandson Dyad 220 two-cylinder two-stroke engine. The fuselage was of pod-and-boom design, and the whole airframe was of non-metallic construction. The Teleplane was started from a pneumatic catapult launcher and recovered by a normal skid landing. It had a radio-command guidance system for full control from the ground, but could also fly autonomously on autopilot. The downlink transmitted telemetry data and video imagery from a nose-mounted TV camera.
At least 23 XBQM-106 vehicles in 13 different variants were built, including at least two designed by Teledyne Ryan. In January 1984, new designations were allocated to then current configurations of the FDL-33 vehicle. The XBQM-106A was built by Digital Design Inc., and had a cylindrical tail boom, a high wing of slightly reduced span and a T-tail. The XBQM-106A also had a parachute system which could be used as an alternate recovery method. The XBQM-106B was an FDL-modified XBQM-106A, which lacked the latter's parachute landing option and had a tailboom with an elliptical section. It was used for pilot proficiency training. The XBQM-106C was an experimental modification of the XBQM-106B with a new tail, which had the horizontal stabilizer relocated to the mid of the vertical fin. The whole XBQM-106 test and development program ended in early 1986.
Above text straight from Andreas Parsch's "Designation Systems" website:
http://www.designation-systems.net/dusrm/m-106.html
List of variants (from various sources):
Another source gives this interesting extra bit of information:
Source and full description of that program: High Altitude Solar Power Platform (NASA Technical Memorandum)
Finally, the BGM-106 is also described in various sources as a "Self Repairing Flight Control Systems Tactical UAV"...
an experimental aircraft developed to study flight control concept
The XBQM-106 (or XBQM-26) mini-RPV was a tail-stabilized, pusher-propellor aircraft that was designed and developed within the Flight Dynamics Laboratory (FDL) at Wright Patterson AFB. It was normally powered by a Herbrandson DH220, 18 HP, 2-cycle engine. The vehicle was widely used in research programs dealing with a variety of mini-RPV missions, most of which were oriented towards defense suppression and harassment. A limited number of these vehicles were manufactured "in house" at FDL, and the program included investigations into low-cost methods of fabrication. It is unclear if there was ever any intent to adopt the XBQM-26 for operational service, since the program had a strongly experimental flavor, with the different configurations used to evaluate a wide range of possibilities for tactical UAV operations. At any rate, the program was terminated on Oct. 1, 1982 with no prospects for the type to be produced or fielded for other military applications.
Nominal performance figures for this vehicle are as follows:
Gross take-off weight: 225 lb (102 kg)
S.L. optimum cruise speed: 61 knot (113 km/h)
S.L. max dash speed: 87.5 knot (162 km/h)
S.L. climb rate: 900 ft/min* (274 m/mmn)
Service ceiling: 10,000 ft* (3049 in)
Payload weight: 54 lb (24.5 kg)
Fuel capacity: 56 lb (25.5 kg)
*at mid weight of 180 lb
Adapted from REMOTE SENSING OF BATTLEFIELD WEATHER CONDITIONS
USING UNMANNED AIR VEHICLES and Wikipedia.
Beginning in 1975, the USAF's Flight Dynamics Laboratory (FDL) designed and built the FDL-33 series of small experimental RPVs under the designation XBQM-106, sometimes called Teleplane. The Teleplane vehicles tested several wing, nose, tail and engine configurations, and evaluated RPV equipment and technologies like a fluidic autopilot, seeker/warhead options for expendable strike missions, light-weight composite construction and low-observables (stealth) technology.
The XBQM-106 vehicles were relatively small drones powered by a low-power piston engine driving a pusher propeller. The first vehicles had a McCulloch MC-101 engine, but most of the later ones used a Herbrandson Dyad 220 two-cylinder two-stroke engine. The fuselage was of pod-and-boom design, and the whole airframe was of non-metallic construction. The Teleplane was started from a pneumatic catapult launcher and recovered by a normal skid landing. It had a radio-command guidance system for full control from the ground, but could also fly autonomously on autopilot. The downlink transmitted telemetry data and video imagery from a nose-mounted TV camera.
At least 23 XBQM-106 vehicles in 13 different variants were built, including at least two designed by Teledyne Ryan. In January 1984, new designations were allocated to then current configurations of the FDL-33 vehicle. The XBQM-106A was built by Digital Design Inc., and had a cylindrical tail boom, a high wing of slightly reduced span and a T-tail. The XBQM-106A also had a parachute system which could be used as an alternate recovery method. The XBQM-106B was an FDL-modified XBQM-106A, which lacked the latter's parachute landing option and had a tailboom with an elliptical section. It was used for pilot proficiency training. The XBQM-106C was an experimental modification of the XBQM-106B with a new tail, which had the horizontal stabilizer relocated to the mid of the vertical fin. The whole XBQM-106 test and development program ended in early 1986.
Above text straight from Andreas Parsch's "Designation Systems" website:
http://www.designation-systems.net/dusrm/m-106.html
List of variants (from various sources):
- Air Force FDL XBQM-106 Teleplane (XBQM-26) (1x McCulloch MC-101) (1975)
- Air Force FDL XBQM-106 Teleplane (1х Herbrandson Dyad 220)
- Air Force FDL XMQM-106 Teleplane (Experimental tactical RPV, no details)
- Teledyne Ryan XBQM-106A Teleplane (redesign, no details)
- Digital Design Incorporated XBQM-106A Teleplane (Modified XBQM-106 with 1х Herbrandson Dyad 220)
- Air Force FDL XBQM-106B Teleplane (Modified XBQM-106A with 1х Herbrandson Dyad 220)
- Air Force FDL XBQM-106C Teleplane (Modified XBQM-106B with 1х Herbrandson Dyad 220)
- Teledyne Ryan Model 328 (development of Teleplane, no details)
Another source gives this interesting extra bit of information:
A samarium cobalt motor/controller was developed by Sundstrand Corporation for the Air Force XBQM-106 RPV.
Source and full description of that program: High Altitude Solar Power Platform (NASA Technical Memorandum)
Finally, the BGM-106 is also described in various sources as a "Self Repairing Flight Control Systems Tactical UAV"...





")