- Joined
- 25 June 2009
- Messages
- 13,781
- Reaction score
- 3,060
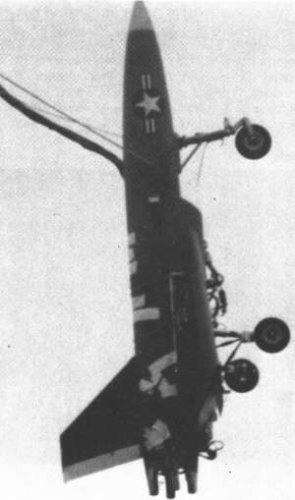
In 1975/76, the US Naval Weapons Center at China Lake built an unmanned VATOL (Vertical Attitude Take-Off and Landing) research vehicle designated XBQM-108A. It was to be used to as a demonstrator for a "pogo" or "tailsitter" aircraft that could take off and land straight up and down on its tail. The first successful tethered hover was demonstrated in September 1976.
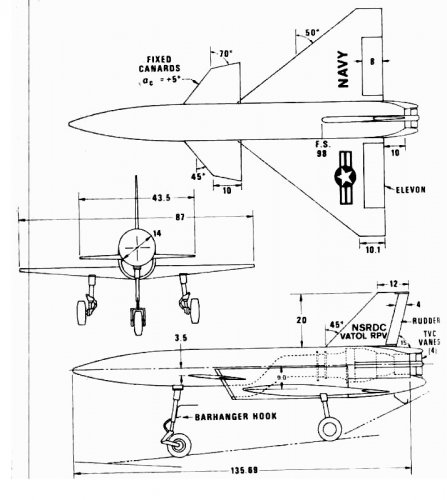
The XBQM-108A consisted of the fuselage and vertical tail of an MQM-74A Chukar target drone and new delta wings and small foreplanes. The radio command guidance system of the MQM-74A was also retained, but the drone was fitted with a new wing, a Teledyne CAE J402 engine, fixed tricycle landing gear, and additional flight control systems. The exhaust of the CAE J402 turbojet engine was modified with a rotating vane-type thrust-vectoring control system. Although the XBQM-108A was to land vertically on its tail, the parachute recovery system of the MQM-74A was retained for emergencies. For hovering control, the XBQM-108A was equipped with the guidance unit and radar altimeter of the AGM-84A Harpoon, which controlled the thrust-vectoring vanes and the engine thrust.
The demonstrator was completed and was making tethered flights when the program was cancelled, before any free-flight hovers or conversions to and from horizontal flight could be made.
Sources:
The XBQM-108A consisted of the fuselage and vertical tail of an MQM-74A Chukar target drone and new delta wings and small foreplanes. The radio command guidance system of the MQM-74A was also retained, but the drone was fitted with a new wing, a Teledyne CAE J402 engine, fixed tricycle landing gear, and additional flight control systems. The exhaust of the CAE J402 turbojet engine was modified with a rotating vane-type thrust-vectoring control system. Although the XBQM-108A was to land vertically on its tail, the parachute recovery system of the MQM-74A was retained for emergencies. For hovering control, the XBQM-108A was equipped with the guidance unit and radar altimeter of the AGM-84A Harpoon, which controlled the thrust-vectoring vanes and the engine thrust.
The demonstrator was completed and was making tethered flights when the program was cancelled, before any free-flight hovers or conversions to and from horizontal flight could be made.
Sources: