Voltzz
ACCESS: Secret
- Joined
- 10 April 2021
- Messages
- 368
- Reaction score
- 1,228
Multiple articles in the Dornier Post mention a drone project called Korps-Aufklärungs-Drohne (Corps-Reconnaissance-Drone) as the German predecessor to the CL-89.
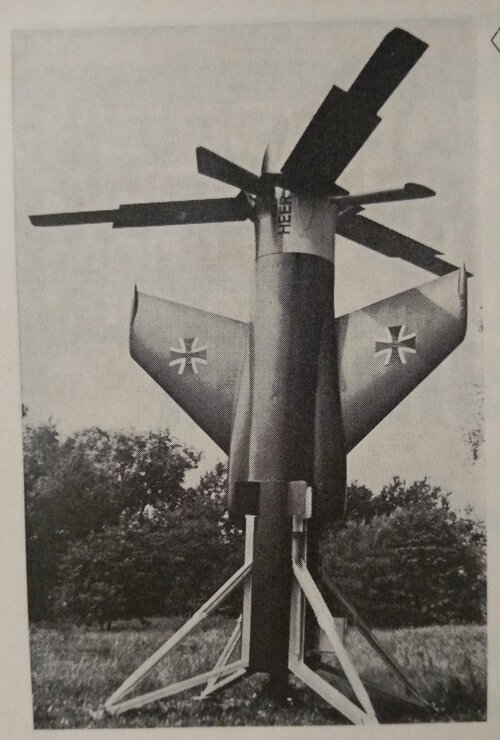
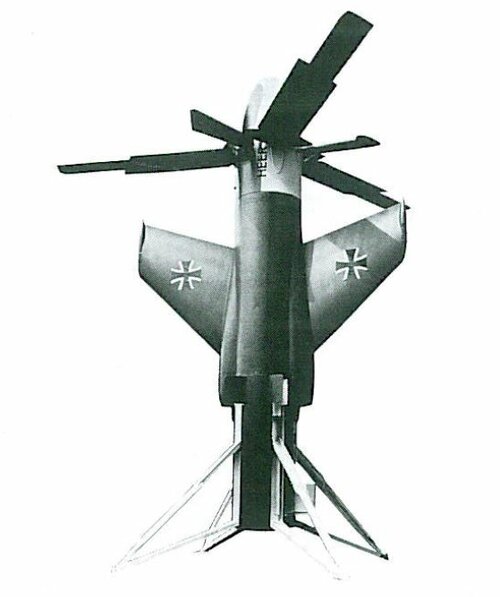
However i can find very little information on it. There is only one article (from 1971) that describes it in some detail. The article has a unlabeled picture that fits the desciption of the KAD. I translated the relevant part of the article using DeepL and also attached the original.
However i can find very little information on it. There is only one article (from 1971) that describes it in some detail. The article has a unlabeled picture that fits the desciption of the KAD. I translated the relevant part of the article using DeepL and also attached the original.
In recent years, Domier System has begun development of an all-weather reconnaissance drone (KAD) for the mid-range, i.e. the Corps' area of interest.
The KAD reconnaissance system is fully mobile. Simple flight planning and preparation, as well as automatic take-off, result in a short response time. The response time is very short due to the high flight speed of the guided missile and a short distance from the launch site to the forward edge of the defense.
The ground equipment is installed in landed vehicles. These are mainly standard vehicles. The entire system is air-loadable.
Designed for high subsonic speeds in cruise flight, the airframe is powered by a low-smoke solid-fuel engine. It is guided by an inertial navigation system of high accuracy. Course and altitude changes as well as switching commands are pre-programmed. During the landing approach, the aircraft is guided to the landing site fully automatically from the ground.
The missile meets the requirement for high landing accuracy by performing a vertical landing at a predetermined location by changing the tail geometry and pivoting the longitudinal axis of the missile by 90° as a rotary wing.
Premature discarding of the rudder section in which the payload is located enables rapid recovery. Processing and evaluation of the films. The guidance procedure during flight and landing cannot be interfered with.
Reconnaissance missions can be flown using standard reconnaissance sensors, such as side-looking airborne radar (SLAR), an aerial camera, infrared line scan (IRLS) and similar
equipment.
To shorten the response time, remote data transmission can be used for the SLAR and the IRLS device.
In designing the system, particular emphasis has been placed on easy handling, low maintenance and a low number of special personnel. The high degree of mobility and independence from the infrastructure allow a flexible range of applications. The system is therefore very easy to manage.
Attachments
Last edited: