BigDog - The Most Advanced Rough-Terrain Robot on Earth
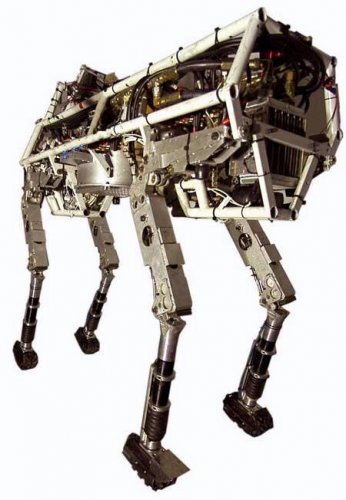
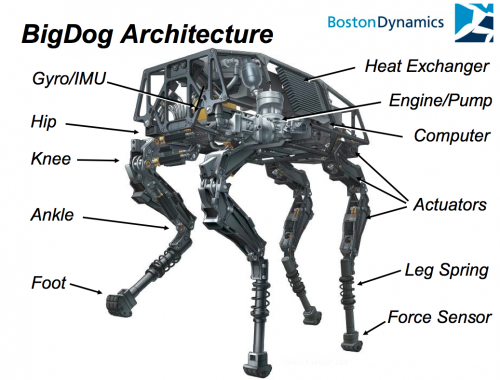
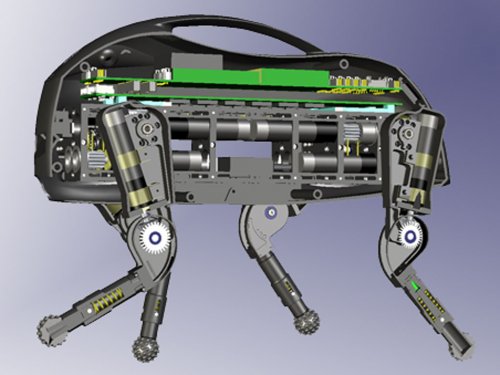
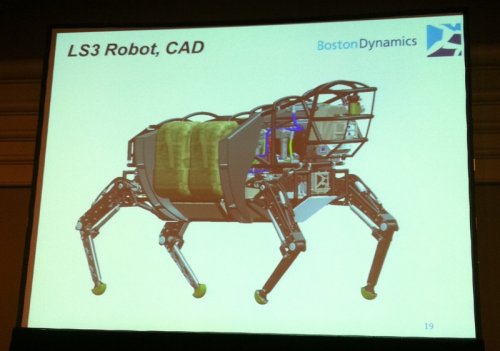
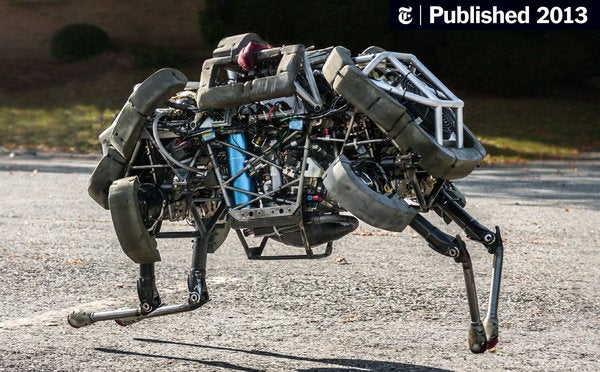
BigDog is the alpha male of the Boston Dynamics robots. It is a rough-terrain robot that walks, runs, climbs and carries heavy loads. BigDog is powered by an engine that drives a hydraulic actuation system. BigDog has four legs that are articulated like an animal’s, with compliant elements to absorb shock and recycle energy from one step to the next. BigDog is the size of a large dog or small mule; about 3 feet long, 2.5 feet tall and weighs 240 lbs.
BigDog's on-board computer controls locomotion, servos the legs and handles a variety of sensors. BigDog’s control system keeps it balanced, navigates, and regulates its energetics as conditions vary. Sensors for locomotion include joint position, joint force, ground contact, ground load, a gyroscope, LIDAR and a stereo vision system. Other sensors focus on the internal state of BigDog, monitoring the hydraulic pressure, oil temperature, engine functions, battery charge and others.
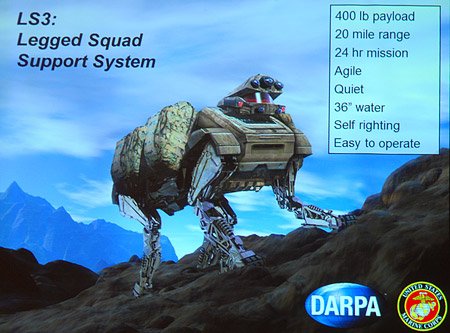
In separate tests BigDog runs at 4 mph, climbs slopes up to 35 degrees, walks across rubble, climbs a muddy hiking trail, walks in snow and water, and carries a 340 lb load. BigDog set a world's record for legged vehicles by traveling 12.8 miles without stopping or refueling.
The ultimate goal for BigDog is to develop a robot that can go anywhere people and animals can go. The program is funded by the Tactical Technology Office at DARPA.