In the Radioelectronic manual of the mig 29, somewhere during the modes explanation or during the missile part is says that SNP(TWS) can't be used as the error is too big to be used accurately for guidance of missiles( either ±4km or ±8km and the radio corrections are in ±100m, ±200m and ±300m, meaning the error is a order of magnitude higher)

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
MiG-29 Avionics
- Thread starter overscan (PaulMM)
- Start date
Шурави1983
ACCESS: Confidential
- Joined
- 12 May 2025
- Messages
- 59
- Reaction score
- 58
The multi-target engagement is done byOne comments on concept from F-4X.
This somehow similar to claimed TWS , and illumination capability of R-27R. Similar TWS work of mode - after lauching missiles, same use of INS and datalink.
However, the main difference is additional,dedicated array to illuminate missiles in final phase: "near antenna".
Seems to be something between horn/flood antenna and pencil beam antenna. From images - something like 20 -30 deg of beam - that can be directed into targets in final phase (less than 10s). This allows for somehow directed illumination, with power density - enough for final approach of missile. But on the other hand - wide enough to "provide illumination for 2 targets in final phase."
On Mig/Su there is nothing like this second antenna.
So if on Mig/Su some illumination while scanning - is really implemented, in final phase, there is a need somehow illuminate target with some means: either by main - pencil beam, or somehow by flood beam or something like this. But there is no dedicated device for that.
Ideally it can be used the main horn for that purposes. For that - there would be a need to just to make the main, parabolic mirror (this "reverse" , fixed mirror) a transparent just for illumination phase.
And the simplest possibility would be just to switch polarization of emitted signal. This would make "mirror" a transparent.
But still emitting horn is pointed somehow downside. Another option would be a use of main beam - that is somehow 3.5 wide. But this refers only to 1/2 power level. A side - there is still several degrees with power level much above "flood antenna"
Another similarity with AMCS concept and system on at least Su is multi-targeting possibility: the same number of two targets can be engaged. At least some sources provides that possibility.
In sources - there is sometimes stated that Su-27 can engaged two targets, in other than only one. And to be clear, I am talking about using R-27R/RE, in regular Su-27S from 80tees. Just regular version.
Examples:
https://www.airwar.ru/weapon/avv/r27.html
"Ракета разработана предприятием ГосМКБ LВымпел и представляет собой вариант ракеты Р-27, имеющий инерциальное управление с радиокоррекцией и полуактивное радиолокационное самонаведение на конечном участке полета. Дальность пуска 80 км. Инерциально-полуактивная радиолокационная ГСН 9Б-1101К разработана также в МНИИ LАгат. ГСН предназначена для захвата целей в диапазоне высот от 20 м до 25 км с максимальным превышением (принижением) 10 км при скорости целей до 3500 км/ч и перегрузке 8. Возможен пуск двух ракет по двум целям. Обеспечена готовность ГСН к применению через 1 с после получения целеуказания от системы управления вооружением носителя типа МиГ-29."
View attachment 802123
"The missile was developed by the Vympel State Design Bureau and is a variant of the R-27 missile, featuring inertial guidance with radio correction and semi-active radar homing in the terminal phase of flight. The launch range is 80 km. The 9B-1101K inertial-semi-active radar seeker was also developed by the Agat Research Institute. The seeker is designed to lock on to targets at altitudes ranging from 20 m to 25 km with a maximum overshoot (drop) of 10 km, at target speeds of up to 3,500 km/h and a G-force of 8. It is possible to launch two missiles at two targets. The seeker is ready for use within 1 second of receiving target designation from the MiG-29 carrier's weapons control system."
Another sources - from MIg-31 thread - there were some copies from book, about airborne radar complexes
https://www.secretprojects.co.uk/threads/mig-31-avionics.153/post-860827
Please take a look on tables, related for Su-27...
First table - nothing suprising - just one target can be engaged:
View attachment 802116
But in the same post is the second table:
View attachment 802117
It is clearly stated - number of engaged targets :2 and provided missile type R-27
"Число одновременно обстреливаемых целей"
"Number of targets fired upon simultaneously"
So, it is not so clear.
Other sources - book from Piotr Butowski, 1994 - Samoloty Wojskowe Rosji. And in section of Su-27 (basic one), it is said that:
View attachment 802118
"Weakness of Su-27 radar is possibility of guiding missiles only on two targets simultaneously"
you know ...weakness....
So this claims emerged in different sources. In still other sources (i will not make screen, only if you really want) - some monograph of Su-27 from 91 year, polish this one
View attachment 802121
it is claimed that it can designate up to 4 targets with several seconds intervals.
"Su 27 może funkcjonować w kilku warian-
tach: samodzielnie, obserwując jednocześ-
nie 10 celów, z możliwością wskazywania 4
z nich rakietom w odstępach kilkusekundo-
wych;"
"The Su-27 can operate in several variants: independently, observing 10 targets simultaneously, with the ability to designate 4 of them to missiles at intervals of several seconds;"
Still another source (I am writing from memory) was published in 80tee - when this plane (Su-27, 1988 or 89) was presented for west. And designer was asked to compare missile of Su (R-27) with its recent counterparts - that time it was Aim-120A that was finishing development.
And he said, that R-27 are inferior in respect to Aim-120 that they can not be launched parallel to multiple targets at once as AIM-120 can do. But he claimed that they can be lunch with small intervals of time.
So - well, there were claims that indeed at least Su-27 & R-27R has such limited, multi target possibility.
I am just wondering how this would be accomplished? Maybe:
Either - missiles are launched in some sequence.
As R-27RE had advantage in range - it could be lauched first, against the closest target. After several seconds - there would be lauched missile(s) (R-27R) against the second target. After launch - radar would work in some kind TWS updating data to missiles about two targets.
And when the first missile(s) for the first target is(are) in final part of its flight - just before target, several seconds before impact - radar switches , for couple of seconds to single target tracking & illumination of the first target, until impact.
The second target is that time not tracked, and just extrapolated.
(Maybe - data is taken , via fighter - fighter datalink from other plances - Su-27 works in common information field via TKS-2).
The second missile fly with own INS. Once the first target is engaged, radar could switch to the second - to re-find them, updates missiles - and egaged the second target.
Another option would be instant multi-target mode, with use - this scanning approach (as Squirrel claims, if this is true).
As Su- does not have any dedicated antenna for ilumination, and (if) for that just main beam is used - both targets have to be in some rather narrow field of view - to allows for frequent illumination by main beam (assuming scan line work of radar), and also by some side part of beam (less power denisty - but several degree wide).
Of course - such mode would be implemented only on Su-27. On Mig - this had no sense -as it have only pair of shorter range R-27R.
But still such scanning while tracking & ilumination would be possible. And have several advantages (maybe I will write in another post)
Of course - guess that such extended functionality would be only for Soviet Union maybe War Pac. Not to be implemented on Su-27SK or sth like this. That is maybe a reason why such mode is not present in manuals.
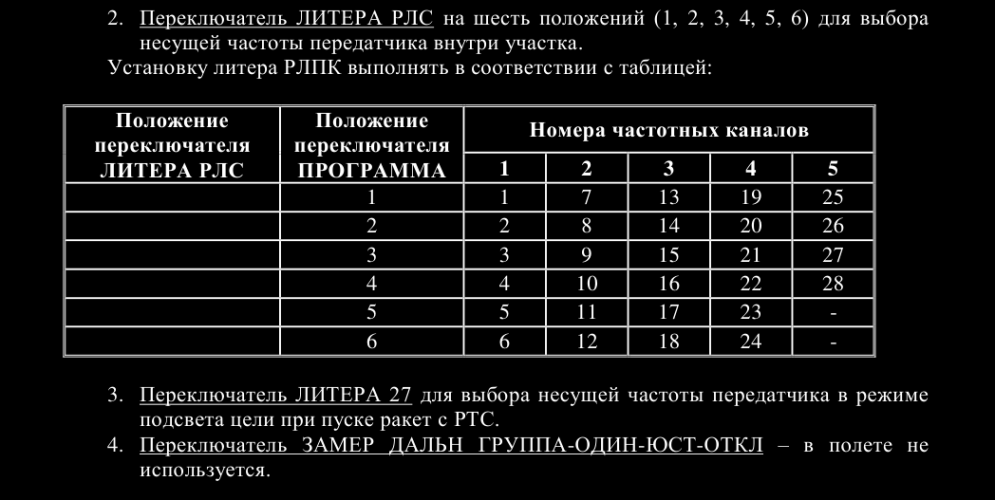
1.Separation of frequency occupation. Jet use different (central) frequency to guide different missiles, so that:1. Radio corretion commands are distinguished(missile: if it's not my referenced frequency, then that comman is not for me.) 2.Illumination is distinguished (missile: if it's not illuminated with my referenced frequency, than it's not illumitated for me.)
This is implemented by the so-called 'liter' frequencies,begun with MiG-23 series. This allows you to guide different missiles with your allies without interference. (like a multi-carrier and multi-target attack.) Also, you can attack one single target with multiple missiles. (In S-23 - same frequency; in RLPK-27/SUV-29 - no, because different missiles might need different corrections.)
(Picture from Su-27SK manual. Maybe you can choose between 28 options, or maybe only 6(with another 5 pre-fixed), idk.)
(Picture from S-23 repair manual.)
2.Separation of antenna occupation (in time). The target only need to illuminate in the terminal phase, so, if there's no target maneuver, radio correction is not needed(by default, the codes are all 'zero', so no correction is made), then you can focus on one target, let the 'second' fly straight until you finished the first. Then you turn to the second. Therefore, this so-called 'multi-target engagement' is strictly limited, being of no use in practice. But indeed, maintaining dynamic models for 2 missiles simultaneously requires some processing capability of airborn computer.
I once had a chart somewhere but discarded. Honestly it's just kinda advertisement, forget about it.
")
Attachments

Last edited:
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
I am talking not about SNP. It will be explained below, or in another post.In the Radioelectronic manual of the mig 29, somewhere during the modes explanation or during the missile part is says that SNP(TWS) can't be used as the error is too big to be used accurately for guidance of missiles( either ±4km or ±8km and the radio corrections are in ±100m, ±200m and ±300m, meaning the error is a order of magnitude higher)
What you described - is generally the same /similar?, I proposed in my "thought experiment"2.Separation of antenna occupation (in time). The target only need to illuminate in the terminal phase, so, if there's no target maneuver, radio correction is not needed(by default, the codes are all 'zero', so no correction is made), then you can focus on one target, let the 'second' fly straight until you finished the first. Then you turn to the second. Therefore, this so-called 'multi-target engagement' is strictly limited, being of no use in practice. But indeed, maintaining dynamic models for 2 missiles simultaneously requires some processing capability of airborn computer.
I once had a chart somewhere but discarded. Honestly it's just kinda advertisement, forget about it.
.And I never said, that this is without limitation. And in practice - that would be "problematic" to use.
And you saw some chart. Is it possible you to find them?
What you described is maybe slightly more limited, then my "thought experiment"
As, I understand - there is only single target processed by radar at time.
Second target, after missile is launched - is left with own, until the first is finsished. Even corrections are not provided....
Is second target even tracked, while system focuses on the first target?
But still to launch missile to the second target - there is a need to get lock for them - at least to provide initial data. Some separate frequency needs to be assigned to the second missile. And that frequency needs to be somehow preserved.
Also initial launch condition, for second target (initial INS coordinate system common for missile and radar "inertial reference coordinate system" - see https://www.secretprojects.co.uk/threads/r-23-r-24-aa-7-apex-r-27-aa-10-alamo-aams.60/post-881037 ) needs to be somewhere preserved.
So this looks be some mode of radar, not tactics.
If this is just "tactics" with only single target track/engage possibility that would looks like:
(warning , it is not serious... )
Pilot locks first the closest target - launches missile. Then drops lock. Missile goes by its own to the first target.
Pilot changes codes /frequency (liter), manually. Searches, (second target is not preserved anywhere on any screen, as it was dropped in STT..). Finds and locks second.
Launches missile to the second. Then left second target. Missile for the second target goes by its own.
Than - quickly go back to the first target. Changes codes/frequency to the first set. Searches the first target(it was dropped while STT was locked for the second target). Finds , locks again. System start updating/iluminating missile
After the first target was hit, pilot switches attention to the second. Changes codes (liter) the second.
Searches for the second target, finds, locks. System start updating /iluminating second target. Second hit.
Even in "theoretical mode/advertisement feature" - this can not be a tactics, but rather needs to be feature supported by radar system..
Well, I see value for high precision TWS for single target. IF One target can be tracked with enough precision to provide updates to the missile, and still other targets would be detected (this is still scan), observed in "low" precision (SNP). This would just to give general situation awareness - as in scenario considered by Squirrel (and not only by him... but about that - later)."High precision TWS for a single target" makes no sense at all and doesn't address the lock for the first target mandatory, but not for the second.
Additional benefit (or maybe the main one) would be, not warning target, as this happens in case of purely STT mode.
From target point of view (RWR) - there was just scanning (SNP), then lock for a couple of seconds (RNP), then scanning again(DNP).
The second scanning is all the time when missile is in INS mode. Just several seconds before impact, RWR recives the second STT lock.
(BTW well missile needs to be constantly illuminated in final part, in any way - STT or by some horn or something... I do not see an other option).
But it is too late - just couple of seconds before impact. Not too much time to make any turn, or do something.
And, such surprise may be only achieved if adversary does not know such pattern. Please - remember - we taking about 80tees!
So, if you are a Soviet military decision-maker what would you do in such case, to preserve that surprise? Hmm.
For sure - you will sold that weapon with that mode, to everybody, India, Algeria, Syria - everywhere. And of course - you should put this to the English translated manual.
"High precision TWS for a single target" makes no sense at all and doesn't address the lock for the first target mandatory, but not for the second.
Second target (if we consider mutitarget scenario) in this scenario, also needs to be locked, at least for a while, but that would be more difficult, while scanning. So maybe better - just achieve stable dual - lock before for 2 targets, one by one.
Then keeps this double lock (interleaved in time) for a while. And then possible goes to TWS (or stay in dual lock?)
But this is just speculation, and only thought experiment - as you mentioned - no point to evaluate, or discuss that further.
Seems that you do not understand that. I will explain in an another post.Which also takes 0.8-1.6 seconds minimum, after the antenna has slewed there with its 57-70 deg/s limit
Last edited:
Шурави1983
ACCESS: Confidential
- Joined
- 12 May 2025
- Messages
- 59
- Reaction score
- 58
There's no flaws in your experiment.What you described is maybe slightly more limited, then my "thought experiment"
As, I understand - there is only single target processed by radar at time.
Second target, after missile is launched - is left with own, until the first is finsished. Even corrections are not provided....
Is second target even tracked, while system focuses on the first target?
But still to launch missile to the second target - there is a need to get lock for them - at least to provide initial data. Some separate frequency needs to be assigned to the second missile. And that frequency needs to be somehow preserved.
Also initial launch condition, for second target (initial INS coordinate system common for missile and radar "inertial reference coordinate system" - see https://www.secretprojects.co.uk/threads/r-23-r-24-aa-7-apex-r-27-aa-10-alamo-aams.60/post-881037 ) needs to be somewhere preserved.
So this looks be some mode of radar, not tactics.
If this is just "tactics" with only single target track/engage possibility that would looks like:
(warning , it is not serious... )
Pilot locks first the closest target - launches missile. Then drops lock. Missile goes by its own to the first target.
Pilot changes codes /frequency (liter), manually. Searches, (second target is not preserved anywhere on any screen, as it was dropped in STT..). Finds and locks second.
Launches missile to the second. Then left second target. Missile for the second target goes by its own.
Than - quickly go back to the first target. Changes codes/frequency to the first set. Searches the first target(it was dropped while STT was locked for the second target). Finds , locks again. System start updating/iluminating missile
After the first target was hit, pilot switches attention to the second. Changes codes (liter) the second.
Searches for the second target, finds, locks. System start updating /iluminating second target. Second hit.
Even in "theoretical mode/advertisement feature" - this can not be a tactics, but rather needs to be feature supported by radar system..
Sadly, I know quite few about how pilots actually operate these machines, but mainly focused on the 'back-end' of them. And the operations can be mostly customized by the softwares, so I can't tell the procedure is right or not. Anyway it's quite reasonable.
In general, This require the on-board computer to compute separated dynamic/kinematic prediction/calculation for two pairs of target and missile, so after finishing the first, your jet still 'remember' the shared 'coordinate system', and send correction to the missile, also doing the illumination.
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
There's no flaws in your experiment.
Sadly, I know quite few about how pilots actually operate these machines, but mainly focused on the 'back-end' of them. And the operations can be mostly customized by the softwares, so I can't tell the procedure is right or not. Anyway it's quite reasonable.
In general, This require the on-board computer to compute separated dynamic/kinematic prediction/calculation for two pairs of target and missile, so after finishing the first, your jet still 'remember' the shared 'coordinate system', and send correction to the missile, also doing the illumination.
Thank you very much for your answer. This is some insight, even if you are not familiar with details.
Generally, summarize :
1. It have to be some mode, supported by software. Actual implementation depends on software "package" implemented
2. Targeting solution is prepared and kept in memory , for two targets (pair target - missile(s))
3. This may have little practical value - as it may required specific tactical situation to be successful
This is my understanding:
In minimum (the lest chances from described single target track - single target engaged) implementation:
1. Targets are observed in SNP. System estimate distances, closures rates and effective ranges R-27R(E)
2. System or pilot selects at least one (or maybe two) to be engaged.
3. When first target is in range. Pilot press zahvat button (or lock is done automatically) - the first is locked. Firing solution (precise position and vector) is being developed. Rough position and vector (from SNP) for the second target in this time is extrapolated in memory.
4. Pilot launches missile against the first target. System works for a while, for the the first target - as we know, tracking target and providing corrections.
Points 3, 4 takes several of seconds, minimum. Let say five to seven. More if required by separation in time. Even more - if the second target wants to be locked when in optimum distance to immediately launch missile.
For all this time - the second target is assumed straight flight - and its position is only extrapolated
5. After some time (separation in time) - required, and assumed, pilot (or system), switches to the second target. Its position is somehow extrapolated, so if separation in time is low (couple of seconds), and if target has not changed trajectory significantly - its position is somehow known. Radar searches in that area. Gets lock. Firing solution (precise position and vector) is being developed.
6. If target is within range, pilot launches missile. System works for a while, for the the second target - as we know, tracking target and providing corrections. Position of the first target in this time is only extrapolated. Missile for the first target get no corrections and fly to assumed position using only INS.
Again , points 5, 6 takes in minimum case several seconds. Maybe more if decided.
7. Radar switches to the first target.
This may be immediately after launching the second missile - to increase probability of engagement of the first target. In such case extrapolation period for the first target takes only couple of seconds (let say 7 -8). But can be delayed somehow. Maximum delay is somehow several seconds before missile should go to semiactive.
Again ts position is somehow extrapolated, so if separation in time is low (couple of seconds), and if target has not changed trajectory significantly - its position is somehow known. Radar searches in that area. Gets lock. Firing solution (precise position and vector of target) is being re-developed. Coordinate system, from launch time - for first missile is restored. Missile gets updates. In final part the first target is being illuminated and missile goes semi-active. The second target is all the time extrapolated, and missile goes using only INS.
8. The system or pilot decides that the first missile finished its work. This can be done by system - after calculated - estimated time. Or by pilot manually, or some combination of them (system estimates time when the first missile should hit the first target - but up to pilot is to decide to switch target). Some hint might be - if target "disappear from lock" or changes its vector speed (value and/or direction), suddenly.
Points 7, 8 takes in minimum a dozen of seconds, lest say - between 12 and 18. All this time - the second target not need to change its flight path significantly.
9. Radar switches to the second target. Postion is estimated. Hopefully regain lock. Rest is known.
This scenario assumes that radar works at single target at time. Position of the second target is extrapolated that time (both in radar and in missile). Significant changes in flight profile, for extrapolated target - may lead procedure to fail. For short extrapolation time - it can even work. But time is shared for both targets - less first target is in extrapolation -time - the more time is the second.
To be honest - chances to hit both target - are only theoretical.
Chance to hit only the first target - reasonable, but lower than if just to work with a just single target.
Chances to hit the second target - well, questionable.
Some optimal, but still possible of being implemented - scenario, is that radar can work with both targets the same time.
And can provide updates to the both missiles
So this would like like above - but some dual target track can be achieved and maintained.
I do not say how this can be implemented : dual track only (DTT) or TWS. But in any case - this should be precise enough to provide corrections for missile(s) for two targets. And I do not think - it out of possibility of Soviet N-001 hardware.
It is rather of developing and testing somehow algorithm (software).
In such case procedure looks similar as above but:
1. There are selected two targets to be engaged. They are being started tracking with precision enough for create targeting solutions for R-27R(E) missiles.
2. First missile(s) to the target is launched.
3. When in flight - it is provided target position update to the missile. Both targets are tracked in parallel.
4. After some time (time separation), when in range, the second missile(s) is being launched. There is no need for some "preparation" as targeting solution is constantly updated and ready for the second missile.
5. Two targets are being tracked. If necessary - updates for missile(s) is provided on channel and code (liter) assigned to that missile that requires it.
6. When the first missile is close to the first target, radar needs to goes to single target track*. Radar just has stayed in position of the first target (no additional search for the first target is needed). It stays for some estimated (computed) time necessary to finish guidance.
Similar as in the previous scenario - return to to the second target may happen manually , automatically, or both.
This time in such scenario the only "blind time" is for the second missile, while illuminating the first one in STT.
In that time position of the second target is approximated both in radar and the second missile(s). This time could take from couple to several dozen seconds
7. System switches to the second target. Searches in extrapolated position. If finds - goes to single track, provides update to the missile and if it is time - starts illumination.
*take note - that I wrote that "radar needs to go single target track", and no : "radar needs to start illumination". If we assume some dual - target track - in such mode - radar constantly switches between positions of two targets, working either on the first or the second. Update of parameters - when antena is pointing target - can be counted in fraction of second - let say 0.2 s (See documents T9 and T12 - you know what I am talking: in tracking - iteration period is 20ms - one for monopulse target tracking and speed tracking, another 20ms - is for distance tracking. So in 0,2 - there are up to 5 such cycles. If we assume illumination additional 30ms is required, so : angle - frequency tracking 20ms / illumination 30ms / distance tracking 20ms / illumination 30ms - so 100ms. In 0,2s - two such cycles , with 4 illumination periods.
Depending on angular positions of targets, switch time can be quite short. Assuming antenna speed 70 deg/s (in reality is more - this is just scanning speed, antenna can move faster - but I do not know how. But in T9/12 when switch to locking - there is said "with maximum speed". But assuming 70 deg , and separation between targets 15 deg - switch time is 0.2 s + some time for positioning, let say total 0.3s. So we can assume from 0.5s cycle time, refresh and so 2Hz rate in DTT mode, and in worst scenario up to 1s / 1Hz. In final part of that mode - radar can illuminate target as well. So radar needs go to pure STT - only about - lest say 5 seconds before impact. That would be more than enough. Maybe 8 in the worst case, if targets are more separated and DTT update rate lower is ~1s.
Another problem is that position of the missile is also not known precisely. It is only estimated - when they should be. Missile flight is just real case - and missile can fly somehow longer than predicted, or earlier. And that imprecision that also should be take in account.
(In ideal world missile should "tell" where it is, and how far is from target. But there is no down-link. If this depends on me - I would check if proximity fuse is working - if it works in the frequency band of radar)
Another problem is when to stop illumination for the first target - and switch to the second.
This should happens when missile finished it work (either hit or miss target).
But -this is not known precisely at fighter.
If pilot or system detects that contact with target is lost, this can be clear sign to stop switch to the second target.
(Here once again - some uplink, or some "hints" from fuze would be more than useful)
But in other case still - some additional seconds are needed, in case that missile still is working.
So this is "blind period" - when the second missile goes INS.
So once again : missile is illuminated in DTT cycle. With high ratio cycle - this can be done to just several seconds (3? 5?) before impact. But as the postion of missile is is not known precisely it is also not known, "when impact time will be". So that need some extra time - for example additionally 4s. So continues uninterrupted illumination would starts 9s before estimated target hit
Next - target can do "unexpected" maneuver. if this is done - in STT phase - there is no other option like extend STT phase.
Finally, pilot/system does not know, when to stop illumination and switch to the second target. If contact with target is sudently braken - this can happened quite immediatly. In other case - some extra time is necessary (still 4,5 seconds, after).
And that is all "blind" time for the second missile. It can be as short as 5s - if we system knows where own missile is (but it does not...), and hit was "detected". Or as long as 15 seconds if we take in account all "unknowns". Or more if target did forced maneuver extending STT time. Uhh..Really complicated... even in theory...
When the first missile hit target, or better - when we stop working on the first target, the second missile should be in such distance that - it is still before terminal guidance. So before it goes semi active. But we have to add - additional time - for radar to re-find and re-lock to the second target, and if possible - provide corrections.
Separation time necessary is expected time when the second missile goes blind + some estimated time to regain lock, and provides updates to the second missile - and that needs to be accomplished before second missile goes semiactive.
Estimated time of regaining lock - depends on how long extrapolation time was.
For 5 seconds of (INS/blind), and dual lock, regaining of lock can be immediate: so as low as 1 to max 2 seconds.
For some most possible case - when - missile extrapolation took 8-10 seconds. - this can take from 2... 4, 5 seconds if some small search was needed.
In the worst case - when INS period was some dozens seconds - well, if the second target not was flown strictly straight, it can be anywhere, and regaining lock may be impossible. Also missile flown in wrong direction for long time ... so is in wrong place...
Corrections take 1/3 s (as I remember).
And then we must count time - for illumination of the second missile.
If time of STT for the first missile is the same as for ilumination time (both in STT or in DTT) for the second - we can just skip this.
But illumination for second missile has to start earlier (not just in final STT, "3 or 5 sec").
Assuming missile flight time 30s (up to 60, 70 is in total - but this is for max range that is somehow unrealistic, unrealistic to fire missile on the longest range) - and that up to 70% can be inertial - it is wise to assume at least 10 s for illumination time. Or slightly more 12-15s, So this illumination takes from 5 till 7 seconds more than just STT in the first case. Let assume 7 s more.
cut some calculations, to be honest - it is not so easy to calculate
, lets try:optimistic case : 5s for "blind time", 1 sec for regaining lock, and then 10s for second misisle to be iluminated - means - separation time should be at least 16s
In some more balanced case: it is 20s "blind time".
( when missile position is not known: 4s need to be added "in advance" (for this imprecise missile positon) to those standard 5, and 4 after "extra time" ("do we hit target?") Also if there is some small maneuver after radar goes STT - some additonal 4 s added - so this can take up to 20s..)
+ time for regaing lock - this should take as long as 4s
+ and 7s for accounting that second missile should be iluminated longer.
So all in all this is up to 30s of separattion time. And this is not the worst case.
So, we see that - this can work, but also can not work at all. Depending on case and luck. Pilot should take separation time at lest 20s, still taking possibility that second missile can not work.
He should select the closest target from enemy formation as first - and fire at them relatively long range (but not maximal!) with R-27RE. The second target should be the last one from formation. And to be targeted -by closer range R-27R. This should provide separation time at least 20s or more. At least in theory. In reality, with complex tactical environment etc - well... maybe just better to get single target and launch missiles from different ranges to them
To be honest - it does not look convincing. If one can use some feedback from missile (like detection of fuse missile "knows" exactly distance to target and closure speed when close to target - proximity fuse should start. That would be information that radar should go to STT. And proximity fuse will not work if missile hit target. Or it can stop - if missile miss (that why it is called missile
). In such cases - blind time may be as short as 3...5 s. Regaining lock with the second target would be almost instant. But still separation time - should take in account some "delay of missile in flight" or that target just turn -still complicated.In another "fictional scenario" - if we assume high rate (2Hz or 1Hz) dual target track - and if it is possible that in "the the last meters" (closer than 3km before impact) the main beam can be supplemented with some "flood array" just to fill the gaps (in this 1Hz or 2Hz cycle), then there would be no "blind period".
Or, when illuminating target some imbalanced DTT approach may be used: cycle like 2s for tracking illuminating the first target and just 0.3 - 0.5s - to snap to to the second target - to just update position of second target. And sure -this "0.5"s pause - still may be problematic.. so for short period of time, , when missile is expected to hit target - antenna may stay at the first target. Let say for 5s. And then return to unbalance again for couple of seconds (just for case the missile for the first target is "late")
But this is just pure fiction.
Let assume other scenario, also somehow SF, fairy tail, but maybe still possible... - when Su-27 is not alone , but in formation. And some of planes (one or more) are "active" - and shot missile and at least one (leader?) is not actively - but just to keep tracking and providing information to active one.
In such scenario to make sense - at least 2 (or more) planes are "active" and target up to 4 targets and one. One is passive - not launching (initially) missile .
(BTW in 2 fighter formation - this have no sense - as 2 plane can engage 2 targets in normal mode).
We assume that they are connected with datalink (TKS-2) and its position is somehow relatively aligned each other but not perfect.
(Alignment - is done - by comparing trajectories of targets -both in active fighters and passive - just to match them and correct possible errorS translation and rotation - I can provide some citation for that from book**)
What can this bring benefits?
First - during "INS blind time" of second missile - position of the second target is not just puerly estimated - but is known - with some error but is known. If the second target take forced maneuver, still active fighter can update missile. Also regaing lock, even after long INS time - could be relative fast, and possible.
Now the whole scenario may be possible even in case of force maneuvers of targets.
And if in such scenario : fighters in formation can share "targeting data" , "passive" fighter - when necessary - can illuminate one target when this would be required. This can happen when - for some reasons - the second missile can not be illuminated in time by own fighter. The "passive" fighter then can "save" that missile(s) providing illumination.
If such "sharing targeting data" is possible, other scenario may be possible:
In two (or more) fighter scenario, when engaging one (or multiple) target(s), one fighter can take role of "shooter", other(s) role of "illuminators". Shooter would take high speed, high altitude- to provide maximum energy from own missiles. He will, leave "iluminator(s)" behind 10 or more km, can close to single or multiple targets , and from close range - non escape zone - he would launch own missile R-27R(E) - especially that energetic one to target(s).
Sure - he will be targeted by Aim-7 missiles from enemy. But Aim-7 has long range due to boost sustained profile - but not so high speed. In topic for Skyflash - there are provided its range, (in long pdf) for Aim-7F (but M share the same engine), for maneuvering and non-maneuvering case. And guess what , for non-maneuvering - range could be as high as 40km ir more (Fighter and target 1,5Ma, high altitude) but maneuvering (rotation with assumption 4g) it drops to as low as 10-12 km (I am writing from memory, one can check).
So shooter - takes shoots - with R-27RE close (but not too close
). Missile(s) launched relatively close, from high speed fighter, have high energy and high chance of hitting target.And shooter takes rapid turn, high g, goes in the dense atmosphere... and start escaping to those Aim-7. He did his job, and now his job is just to survive.
And now - "iluminators" takes own role. Each "iluminator" illuminate just single target, from long distance. Iluminator(s) is(are) in safe distance. And they did own job out of range Aim-7 missiles.
Additionally they can fire own missile, especially if target(s) survive the first attack.
Additionally - if they are more targets behind. Then they can work "in dual target mode".
The first target is being targeted for the missile from "shooter". "iIumminator" has still much time to launch missile(s) to the second target - so time separation is high. And can happened that "illuminatior" fires missile after the first missile (from "shooter") - hit target, but still having ready firing solution for the second target (dual track). But may happen that the second missile is being launched slightly before the first missile from "shooter" gets own target.
Last edited:
How is it nonsense if you can’t disprove it or prove your hypothesis? Or even explain why it would be beneficial to lower R-27 update rate to see other targets that can’t be attacked until lock is broken on a missile designed to hit 8 G 4th gen fighters, or how it would be displayed and why that’s helpful to show a 2D B-scope while the attacked target is shown on elevation/azimuth coordinates.
OMG, there is no lock-on any more after R-27R/R1 is launched. Pls....R-27R is not designed to engage fighters but for engaging much bigger ,slower and non-maneuverable targets. It can be used against fighters ,yes but where is the probability of hit with or without the using of RC- channel than ?
Exactly what is stated by MiG-29B technical manual and the PowerPoint. It tracks, sends out datalink, illuminates, tracks, datalink, illuminate. When datalink drop command is sent then it’s just going from “tracking” to “illumination.”
Again ,stop writing something that has nothing to do with the reality.
Radar can not track only one target , illuminate him and send RC-channel signals w/o the function of radar beam movement by the rows ( scanning/searching).
I do not know why didn’t put it on the HUD. It’s a mystery. As you have read, this line is the right border for circle/rhombus movement and the sign of N-019 antenna elevation in search mode. I don’t know how the pilot is supposed to see other targets on this while guiding a missile…….
It is not 'cause IPV-1/HDD is ? I already described earlier what is it ...
I know and ask any MiG-29 or Su-27 or F-14,15,16 and F/A-18 ,Mirage-2000,Tornado ADV and other pilots/RIO who had chance to fly from 1970's and the following decades.
There is a very good reason this says “cycles of search” has a space then says “cycles of RGS Illumination.” It is not searching and tracking at the same time, or tell me why would it need to track and illuminate 2x in a row before going back to search? It says “types” of cycles not “type.”
It is not reasonable to look at a graphic that shows cycles of search and illumination, the whole rest of the page is about search mode and the whole half dozen chapters before and after about search mode only, and to then say “this obviously means it does search while guiding a R-27r at the same time despite decreasing the effectiveness of the missile and not doing this in RNP.”
Yes, it is in the DNP mode just as it is in the SNP submode.
Exactly, because tacts ( not cycles) of track ( not search) and illumination are part of the search cycle/mode.
On Mig/Su there is nothing like this second antenna.
So if on Mig/Su some illumination while scanning - is really implemented, in final phase, there is a need somehow illuminate target with some means: either by main - pencil beam, or somehow by flood beam or something like this. But there is no dedicated device for that.
During DNP/Ill mode, TWT works in quasi-continuos waveform using two different working frequencies. One for search/track period ,another for illumination period.During arming process on tarmac or in there HAS,they use LITER codes for pairing the 9B-1101K in the R-27R/R1 with N019/E. LITER codes will ensure using special working frequency only during illumination period.So what does radar beam work anyway during DNP ? With function of movement ,beam scans given zone by moving in rows for given time period.Every time when engaged target is 'hit' with pulses ,it is 'hit' by the track pulses ,than with the illumination pulses which have differ working frequency than those used during search/track.As I wrote, it is not possible to track only that target and than illuminate him because radar beam is moving all time long by the rows.As we could see in the MiG-29B FM ,R-27R1 uses quasi -continuous waveform ( mode). If radar tracks only that engaged target after R-27R1 is launched , it would use continues not quasi-continues waveform.
Btw friend, N001 has no possibility to engage two targets but only one. N001V has that capability. N001 has capability to engage one target even with three radar guided AAM's.
A SAHR missile requires fast update rates, especially during the terminal phase and an M-Scan radar can't provide this in TWS. Hence a need to lock on to the target. Pretending that a missile requires a lock for launch, but not for guidance thereafter is completely counterintuitive and makes no sense.
Please stop living in the 1950's and 1960's.
@overscan
''Новый РЛПК-29М с локатором НО19М и БЦВМ Ц-101 обеспечил возможность пуска ракет одновременно по двум целям, улучшились также характеристики помехозащищённости и встроенного контроля.''
'Overscan' , there is no any word in that citation where we can see that it is possible to engage two differ targets only but only and strictly with the R-77. Keep in mind that if radar provides enaging two differ targets, that means that it is possible to achieve that not only with radar but with IR guided AAM's also . IRST can provide engaging target/s only with the IR guided AAM's.
My question from earlier was. What was the real technical difference between the N019 Rubin and the N019M Topaz ? Was it maybe the capability of illumination of two differ. targets in the DNP/ Ill mode? For the R-77/RVV-AE ,there is no need for the illumination at all.
I think that we must keep digging and finding more precise and detailed data and info about N019M Topaz , especially about its capabilities during DNP/ Illumination mode.
Btw , ten operational MiG-29S/9.13S from the 1AE ( 1st aviation sqn ) of the 73 GvIAP in the Shaykovka air base from Spring 1992 never got any R-77. 200 of them which were produced in Kiev factory before USSR desolution were transferred during 1991 to the Akhtubinsk air base -929 GLITs.
Question , so w/o R-77, N019M of those operational MiG-29S couldn't provide engagement of two different targets ?
Now, if radar N019M provides engagement of two different targets with INS+ARH R-77 ( of course during BVR combat ) ,that means that radar must do what after both were launched ? Radar must searches given zone where both targets are.It is simple as that. Same thing do N019 ,it searches/scans after INS+radar guided AAM is launched. Old R-77 like AIM-120 has two main launch modes : LOBL in the WVR combat where radar's lock -on is no need. LOAL in the BVR combat where radar's lock -on is need before launch.
Well, I see value for high precision TWS for single target. IF One target can be tracked with enough precision to provide updates to the missile, and still other targets would be detected (this is still scan), observed in "low" precision (SNP). This would just to give general situation awareness - as in scenario considered by Squirrel (and not only by him... but about that - later).
It is the fact friend not my consideration.
Last edited:
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
It’s DESIGNED to hit 8 G targets! From 50m alt-27 km and 3500 kmh! It is chief weapon intended for F-14/15/16/18 in 80s and it wasn’t made for FIGHTERSR-27R is not designed to engage fighters but for engaging much bigger ,slower and non-maneuverable targets. It can be used against fighters ,yes but where is the probability of hit with or without the using of RC- channel than ?
R-33 cannot hit more than a 5 G target, that’s your missile that is not optimized for fighters.
Where does R-27 come from? A project to copy AIM-7! And when they figured out they could make something better they did. Better. Not “only large targets” better. I humbly ask for evidence before you claim that R-27 was not meant for fighters!
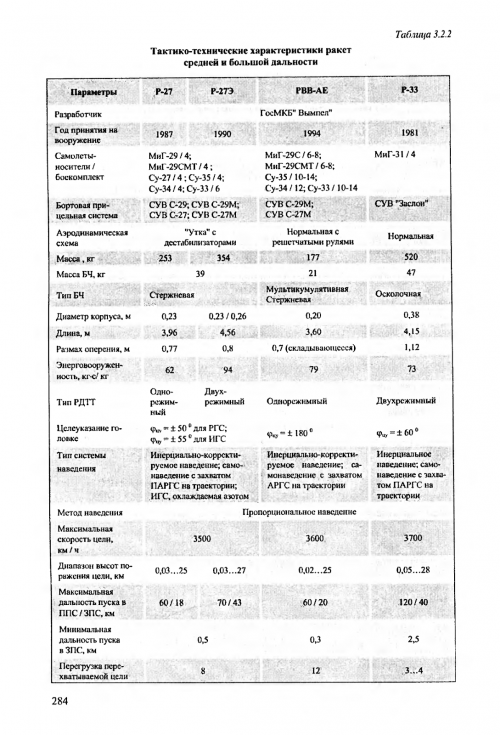
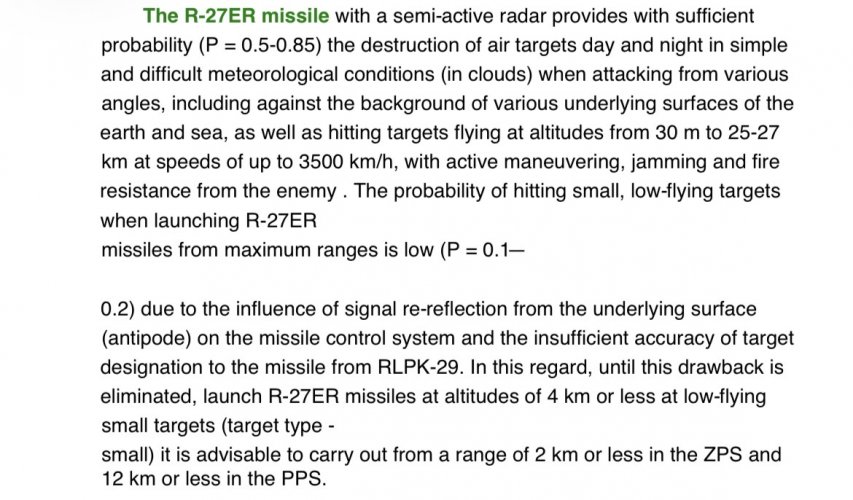
Also, probability of kill is 0.5-0.85 with radio correction. And it says it includes manuevering targets
“destruction of air targets day and night in simple and difficult meteorological conditions (in clouds) when attacking from various angles, including against the background of various underlying surfaces of the earth and sea, as well as hitting targets flying at altitudes from 30m to 25-27 km at speeds of up to 3500 km/h, with active maneuvering, jamming and fire resistance from the enemy.”
I’m sorry the irony…….Again ,stop writing something that has nothing to do with the reality.
Radar can not track only one target , illuminate him and send RC-channel signals w/o the function of radar beam movement by the rows ( scanning/searching).
You are confused squirrel. When was I ever someone to make up pretty bed time theories about the N-019 doing multi target attack? Look at my post you quote, It goes from launch with tracking ( of one target)- illumination- datalink, then starts over (tracking-illumination-datalink, ppt describes this well).,When computer estimates missile within seeker range it sends “turn on seeker” command and stops the datalink portion of the above sequence doing just tracking and illumination cycles. Were you think I talk about multiple targets I do not understand…….
is not 'cause IPV-1/HDD is ? I already described earlier what is it ...
I know and ask any MiG-29 or Su-27 or F-14,15,16 and F/A-18 ,Mirage-2000,Tornado ADV and other pilots/RIO who had chance to fly from 1970's and the following decades.
Ask them about what? Seriously I don’t know what you mean. I am saying your explanation that N-019M would show these “extra targets” found during R-27R/ER guidance would be shown on the right HUD border of the HDD. How? It’s a VERTICAL line!!!!! And you claim N-019 can do this just not track a second target? EVERY piece of real life literature disagrees with this as we have seen and BOTH posted
You have no proof for this by referencing chapter that is only concerned with search modes except for one corner of an instructional graphic that isn’t explained anywhere It is at odds with all other documentation common sense and the entire R-27 guidance chapter I believe I attached. 7x tracking/illumination cycles take 1/3rd second, 1st datalink takes 1/3rd second, 2nd datalink 1/3rd second, the missile is statedExactly, because tacts ( not cycles) of track ( not search) and illumination are part of the search cycle/mode.
To expect 1 datalink signal per second at exactly 1 hz. Yet somehow radar dish has time to search despite never being mentioned to do this and only decreasing its combat effectiveness…..
N001V has that capability. N001 has capability to engage one target even with three radar guided AAM's.
Well to be precise
1. N-001V/VE/VEP only has this ability if the option is purchased, which China did not as evidence by their documentation
2. The N-001 can launch 3x R-27R/ER at once, but the 3rd one would have no datalink support. This is becuase what I said earlier, R-27R/ER expects update rate of 1s. It takes 1/3rd second for 7x tracking/illumination cycles and 1/3rd second for each datalink signal, leaving no space to support a 3rd missile with datalink.
If that is your criteria, you might as well say “N-001 can launch 8 radar guided missiles at one target”
there is no any word in that citation where we can see that it is possible to engage two differ targets only but only and strictly with the R-77.
I literally gave you 5 sources saying specifically R-77 and then you promptly ignored every single one.
If you can’t trust anyone else’s sources why should we search for sources to educate you?
Like I said before, Russians have habit of not saying blatantly obvious things
Question , so w/o R-77, N019M of those operational MiG-29S couldn't provide engagement of two different targets ?
So? This does not prove anything. Russia was simply not keen on stock piling R-77. N-019M already provides a 14%
Range boost on its own and likely better ECCM
And plus, Russia only bought TEN of them without R-77. Don’t you think that says something?
IRST can provide engaging target/s only with the IR guided AAM's.
I mean not in COOP/interaction mode……
Now, if radar N019M provides engagement of two different targets with INS+ARH R-77 ( of course during BVR combat ) ,that means that radar must do what after both were launched ? Radar must searches given zone where both targets are.It is simple as that. Same thing do N019 ,it searches/scans after INS+radar guided AAM is launched.
It uses DRB SNP to build extrapolation tracks on 2x targets 100% in search mode, NO locking or illumination. Even N-019 can build extrapolation tracks in DRB, this just allows you to be creating two tracks using Ts101. This is so called SNP2.
Do you really think 100% searching pattern is the same as searching AND Fox 1 Guidance??? Becuase if so there is NOTHING more to discuss and we are wasting energy on you.
It is the fact friend not my consideration.
Which not a single person here believes becuase you haven’t been able to prove or show it.Or even explain why it would be useful, why it can’t be turned off, or even how it’s shown on the display (and why this is useful) without just saying “I told you it’s shown on the line that the manual says only shows radar elevation!”
Now becuase I’m not sure how many times you read my attachments, one is a paper on Soviet missiles saying max target G is 8, and a part of Su-27 manual saying a 3rd R-27R/ER would be sent without datalink. This is supported in the radio electronic manual and Yefim Gordon and Andre Formin’s books. If MiG-29 could carry 3 of those it would have same limit. Another is talking about how it’s only made to handle 20-30% break in illumination timing.
I think whoever wrote MiG-29B, or the PowerPoint, kindve expected their audience to know that a STT is required to constantly guide a Fox 1
Its not needed to be explained because it is both common sense and indicated by the entire rest of the book and documentation for a missle to hit a maneuvering fighter that requires illumination or jamming signal. I mean a page ago you thought that by saying “The Fox 1 needs STT to guide” YOU thought I meant the R-27 was a beam rider! The SNP mode works with jamming and is specifically meant to target jammers.But I am fine educating people it’s what I love. But We give sources that you ignore either entirely or in part. I’m not sure how much intellectual or rather “debate” honesty is going both ways here. It’s one thing to have an opinion that won’t change in the face of facts supported by common sense and reason. It’s another to state this opinion is supported by documentation that you aren’t able to find to support your argument and say it’s supported and we are the wrong ones.
Afterall, if N-019 as you say searches for other targets while guiding R-27R/ER (oh knows what if the second plane your radar shines off is seen by the R-27 and goes for the wrong target, what ensures R-27 will go for the correct target once it turns on its seeker if multiple are being illuminated in a cycle????), we should find SOME evidence of this SOMEWHERE in the multitude of MiG-29 documentation? Right? Yet we can’t find a single mention, your only proof the corner of a search mode graphic giving an example of the illumination cycles in track and you saying “it’s clearly doing search and illumination at same time it just doesn’t say this anywhere in the text explaining the graphic.”
And how would it make sure the R-27 knows which target reflection to hit??? The seeker has a 6 degree FOV and will do a bar scanning pattern before acquisition! But hey, I guess you think Soviets only thought of R-27 as an anti bomber weapon for some reason!
Nearly the first sentence of “Denis Evstafiev. R-27 missile family” says it was made for all aircraft types and cruise missiles.
What does Markovsky say?
| attack can be disrupted by an enemy attempt to hide, hiding behind terrain or interference. Along with the improved maneuverability of new fighters, this required a corresponding increase in the capabilities of missiles. These are R-27 and R-73. |
Then he says
| The wings are “butterfly" shape, tapering towards the base. They eliminated the occurrence of control surface reversal, inherent in "duck" missiles, which use control surfaces both for control via the main channels and for roll stabilization, and made it possible to intercept vigorously maneuvering and high-altitude targets using more complex and optimal methods. |
Why make control surfaces more efficient and better if attacking no “vigorously maneuvering targets”???
It is just not supported anywhere, and especially by the Mission of MiG-29/Su-27 that these missiles were not designed for “vigorously maneuvering” 4th gen fighters. It was the whole point. To beat American fighters. So what do you have for it being meant for slow maneuvering planes?
Read about how they were made. They were made to kill F-14/15/16/18. I quote a MiG-29 manual “Estimates showed that in terms of combat effectiveness, the new fighter, armed with R-73 missiles, would surpass the F-15 aircraft by 1.4 times and the F-16 by 1.5 times in close maneuverable air combat, and in counter-long-range missile combat combat using the K-27 missile launcher, the MiG-29 will have some superiority over the F-15 in the entire range of altitudes and speeds.” But I’m supposed to believe they made the plane to kill one F-14/15:16/18 at a time EXCEPT the Fox 1 that is stated to be made to hit vigorously maneuvering aircraft of all types?
Also, hope it do this search while maintaining only a 20-30% break in illumination timing, how does this work with your idea
What? lol. LOBL means lock on before launch missile locks on the rail. It’s LOAL that requires no host lock for Fox 3 because it’s the missile locking AFTER launch.modes : LOBL in the WVR combat where radar's lock -on is no need. LOAL in the BVR combat where radar's lock -on is need before launch.
If radar tracks only that engaged target after R-27R1 is launched , it would use continues not quasi-continues waveform.
This is not true squirrel. You misunderstand what a quasi continues waveform is.
Just becuase one target is locked does not mean it is continuous. As MiG-29B says, as the PowerPoint says, as Polish docs say, there is gaps in the illumination and tracking cycles at 10.24ms and 20.48 ms, this is what makes it quasi continuous along with its PRF and PRT and pulse width.
A “continuous wave” waveform is constant, no gaps. No pulses. Constant.
You misunderstood what it is. What do you think DNP means? Discrete (gaps/separated) Continous illumination.
If tracking a single target makes it CW, then why do CW horns exist lol. If tracking a single target makes it CW, why must a radar track while illuminating with CW at the same time? If tracking a single target makes it continous, how does that make the pulse information magically disappear so it fits into X (CW category) of SPO-15 if we’re using a pulse radar?
It is flawed logic, like STT=beam riding. Or “no missiles are specified except the 5 times they are and I ignored them so it must mean it can launch any missile against two targets.” Or “it says tracking is by quasi continuous illumination so how can it be monopulse,” etc etc
Attachments

Last edited:
It’s DESIGNED to hit 8 G targets! From 50m alt-27 km and 3500 kmh! It is chief weapon intended for F-14/15/16/18 in 80s and it wasn’t made for FIGHTERS
Don't be funny. First ever Soviet AAM made for the BVR combat and developed strictly against the fighters was 50G capable R-77/ RVV-AE. Almost all fighters which you mentioned are 9G -capable.
As I mentioned ,yes ,R-27R/T ( ER/ET ) can be used against fighters ( especially IR guided version) but there is big probability that they will miss the enemy fighter especially if target would use active jamming.In that case ,RC -channel will be not used.
Some real practical examples:
During the first Gulf war ( oper Desert storm Jan 1991 ), some of the Iraqi AF MiG-29B had French made Remora active jamm stations.Neither of them were lost and many Iraqi pilots managed to evade AIM-7M launched from USAF F-15C with 9G evasive maneuvers .
During Ethiopia-Eritrea war on Feb 1999 ,Ethiopian Su-27SK launched five R-27R1/ER1 against Eritrean AF MiG-29B and shot down three of them ( if I remember well from one article).Their MiG-29B as we know did not have L203E.
YuAF MiG-29B also didn't have L203E during the March-June 1999 war and many fighter pilots managed to evade AIM-120C4 launched from the USAF F-15C with 9G evasive maneuvers.
On Feb 2022 as we know ,one ukr AF MiG-29 mistakenly shot down with R-27R one ukr AF Su-27.
Yes ,R-27 can hit 8G target but mostly on paper because first ,we have 9G capable fighters and second, practically all new fighters possess active interference system.
In the meantime, I' ve found very interesting photo ( knew for this earlier but forgot to mention).

I am not 100% sure right now but I think it was one of the prototypes of MiG-29S / 9.12S with integrated N019M/ME Topaz/-E presented during 1990's on some MAKS. It carried four R-27R/ER ( suppose four R-27T/ET also or their combo).
Very interesting detail from the perspective of the N019M 'Topaz' capabilities.
Scorpion82
ACCESS: Secret
- Joined
- 20 May 2006
- Messages
- 308
- Reaction score
- 633
@overscan (PaulMM)
this thread is meanwhile completely rendered useless. Maybe the original interesting parts that focused on the subject matter should be retained and the rest moved to a "fanboy fantasy gospel" thread.
this thread is meanwhile completely rendered useless. Maybe the original interesting parts that focused on the subject matter should be retained and the rest moved to a "fanboy fantasy gospel" thread.
- Joined
- 27 December 2005
- Messages
- 18,725
- Reaction score
- 33,142
@Scorpion82 Agreed. I've banned Squirrel from replying to this topic which will hopefully stop further degradation.
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
Ok, a few words from me, in topic "illumination while scan" (not multi-target engagement for N-001, lets close that topic)
Some arguments for and against.
First of all - this discussion is due to, there is not strictly described how this illumination looks like on N-019.
There are some time sequences - but only in "scale of milliseconds". But it is not said clearly that: this is single target track or this is scan line TWS -like scanning , with additional illumination.
As this is not said, explicitly, one can assume this is too obvious for explaination.
The most common understanding is - that is, this is as for missile from that period: just single target track combined with illumination. This is how missiles from that age works.
There is claim that this mode ( ДНП / DNP (режим дискретно-непрерывного подсвета / discrete-continuous illumination mode) Is some mode in which single target is illuminated, but radar antenna works in scan line mode, with possibility to refresh information about other targets.
First arguments "against":
1.
First, the most important, and probably final, and sufficient argument against is - this is not described in any source. Nowhere.
There are many manuals, books , study files from Ukrainian university (T12, T9). I am somehow familiar with them.
Those sources are really, really detailed. Present every aspect of operation, for example details of signal processing, scanning and so on.
But - in any single place - there is nothing, even single part, schema, nothing, nothing nothing, even a single word (ok, almost*).
If radar will provide illumination while scanning - that would be a very important piece of information, important enough to present them. Such detailed or manuals or books, or presentation - I do not think they may go around it.
Why there is nothing about that? Why it is not presented on some diagrams? Why there is no picture of IPV how this looks in this mode?
I've tried to find some suggestions in Internet. Once again - without single confirmation (even "not serious").
Nowhere, anywhere in the whole Internet (at least I have not found them).
The simplest answer is - no this is not working like that.
And - to be honest - it is difficult to - discuss with that argument.
And Squirrel, I am really sorry – but general diagrams with symbols from ILS / IPV - are just description what is (or may be) visible during scanning. Also, time diagrams - are just general description, how time sequences looks like. From description of those modes - we cannot conclude if DNP is STT mode like or TWS mode like.
On the other hand, one can say - ok, it is not described like scanning, but also not described as tracking single target. This is true.
But all missiles up that time (Aim-7, r-23/24, French missiles, semi-active ground to air - like Kub, Hawk etc. work like this. Single target track and illumination.
But opponent may say: R-27R is not strictly the same as old fashioned purely semi-active missiles. It has INS and illumination for them does not need to be strictly continues. This is also true.
So go smoothly to arguments related to feasibility.
I will not spend too much time on them, as the most important argument against is the one above.
And according to feasibility, well one can discuss - if this is true or not. One can build, invent, propose some explanations
(I did, previously)
And one can make argument for feasibility and discuss long hours.
But this is pointless effort - as this should be explained in references, not rather "proposed", "explained" and so on.
2.
scan line - it is not possible to guide semi-active missile. I agree. Maybe it is possible to do this in inertial part and in early semi-active. But it is not possible - especially in the final part of guidance.
Assuming scan period just 1s, and missile speed (moderate) 700m/s and target 300m/s. With relative speed 1000m/s - the last update is about 1km from target - the rest will be only with INS to some estimated point in space. But beamwidth of missile is much larger than for fighter. Assuming N-019 array is 70cm and beam-width 3.5 deg - if missile anntenna size is just 20cm - its beamwidth is let say 12.25 deg. And let’s assume that angular error for monopulse array is 1/15 of beamwidth (there is equation that takes SNR, but generally we can assume like that).This gives : 0.8 deg . In radians is 0.8/180*pi= 0.014. For distance 1000m error is more than 14 meters.
So missile have to flight straight, "blindly" into estimated point in time for the last 1000m. And 14m is probably just radious of effective warhead. This alone - make this solution impractical. And we do not take in account any errors of target's and missile speed estimation, INS. And if target did at lest some minimal change of trajectory - this can increase imprecision.
But what about 2sec scan period? What about higher relative speed? No engineer will make such system. Constant detection of target needs to be at lest, in final part of trajectory.
Here we can support claims that - at closer distance illumination could be provided by side-lobes or flood horn.
Yes, this is maybe even possible. But still signal to noise ratio will be lower than for just main beam. And maybe that matters.
So yes, we can maybe this is feasible, maybe not. We can discuss long. But I will not.
3.
TWS (SNP)- STT (RNP) -TWS (DNP) sequence is illogical.
Sequence SNP (TWS) – RNP (STT) – DNP (TWS) have no sense. General argumentation is: If DNP track while scan is precisely enough to keep updates, why even bother to go RNP(STT)? If it is possible to provide corrections in DNP –> RNP mode is not needed at all. Just SNP -> DNP would be enough.
If RNP is needed thus there is no possibility to track while scan with enough precision to send updates to missile Let’s alone – illuminate target. So DNP mode – is just STT mode – without scanning. That is the simplest explanation.
Ok, once again - we can discuss with that, or not. It does not matter.
(I promised to provide some explanation, why this even be logical I will put them in separate post.
But once again - this is just speculation. It is not said in any manuals, documents and so on.)
(4.. maybe other ...)
Some arguments for and against.
First of all - this discussion is due to, there is not strictly described how this illumination looks like on N-019.
There are some time sequences - but only in "scale of milliseconds". But it is not said clearly that: this is single target track or this is scan line TWS -like scanning , with additional illumination.
As this is not said, explicitly, one can assume this is too obvious for explaination.
The most common understanding is - that is, this is as for missile from that period: just single target track combined with illumination. This is how missiles from that age works.
There is claim that this mode ( ДНП / DNP (режим дискретно-непрерывного подсвета / discrete-continuous illumination mode) Is some mode in which single target is illuminated, but radar antenna works in scan line mode, with possibility to refresh information about other targets.
First arguments "against":
1.
First, the most important, and probably final, and sufficient argument against is - this is not described in any source. Nowhere.
There are many manuals, books , study files from Ukrainian university (T12, T9). I am somehow familiar with them.
Those sources are really, really detailed. Present every aspect of operation, for example details of signal processing, scanning and so on.
But - in any single place - there is nothing, even single part, schema, nothing, nothing nothing, even a single word (ok, almost*).
If radar will provide illumination while scanning - that would be a very important piece of information, important enough to present them. Such detailed or manuals or books, or presentation - I do not think they may go around it.
Why there is nothing about that? Why it is not presented on some diagrams? Why there is no picture of IPV how this looks in this mode?
I've tried to find some suggestions in Internet. Once again - without single confirmation (even "not serious").
Nowhere, anywhere in the whole Internet (at least I have not found them).
The simplest answer is - no this is not working like that.
And - to be honest - it is difficult to - discuss with that argument.
And Squirrel, I am really sorry – but general diagrams with symbols from ILS / IPV - are just description what is (or may be) visible during scanning. Also, time diagrams - are just general description, how time sequences looks like. From description of those modes - we cannot conclude if DNP is STT mode like or TWS mode like.
On the other hand, one can say - ok, it is not described like scanning, but also not described as tracking single target. This is true.
But all missiles up that time (Aim-7, r-23/24, French missiles, semi-active ground to air - like Kub, Hawk etc. work like this. Single target track and illumination.
But opponent may say: R-27R is not strictly the same as old fashioned purely semi-active missiles. It has INS and illumination for them does not need to be strictly continues. This is also true.
So go smoothly to arguments related to feasibility.
I will not spend too much time on them, as the most important argument against is the one above.
And according to feasibility, well one can discuss - if this is true or not. One can build, invent, propose some explanations
(I did, previously)
And one can make argument for feasibility and discuss long hours.
But this is pointless effort - as this should be explained in references, not rather "proposed", "explained" and so on.
2.
scan line - it is not possible to guide semi-active missile. I agree. Maybe it is possible to do this in inertial part and in early semi-active. But it is not possible - especially in the final part of guidance.
Assuming scan period just 1s, and missile speed (moderate) 700m/s and target 300m/s. With relative speed 1000m/s - the last update is about 1km from target - the rest will be only with INS to some estimated point in space. But beamwidth of missile is much larger than for fighter. Assuming N-019 array is 70cm and beam-width 3.5 deg - if missile anntenna size is just 20cm - its beamwidth is let say 12.25 deg. And let’s assume that angular error for monopulse array is 1/15 of beamwidth (there is equation that takes SNR, but generally we can assume like that).This gives : 0.8 deg . In radians is 0.8/180*pi= 0.014. For distance 1000m error is more than 14 meters.
So missile have to flight straight, "blindly" into estimated point in time for the last 1000m. And 14m is probably just radious of effective warhead. This alone - make this solution impractical. And we do not take in account any errors of target's and missile speed estimation, INS. And if target did at lest some minimal change of trajectory - this can increase imprecision.
But what about 2sec scan period? What about higher relative speed? No engineer will make such system. Constant detection of target needs to be at lest, in final part of trajectory.
Here we can support claims that - at closer distance illumination could be provided by side-lobes or flood horn.
Yes, this is maybe even possible. But still signal to noise ratio will be lower than for just main beam. And maybe that matters.
So yes, we can maybe this is feasible, maybe not. We can discuss long. But I will not.
3.
TWS (SNP)- STT (RNP) -TWS (DNP) sequence is illogical.
Sequence SNP (TWS) – RNP (STT) – DNP (TWS) have no sense. General argumentation is: If DNP track while scan is precisely enough to keep updates, why even bother to go RNP(STT)? If it is possible to provide corrections in DNP –> RNP mode is not needed at all. Just SNP -> DNP would be enough.
If RNP is needed thus there is no possibility to track while scan with enough precision to send updates to missile Let’s alone – illuminate target. So DNP mode – is just STT mode – without scanning. That is the simplest explanation.
Ok, once again - we can discuss with that, or not. It does not matter.
(I promised to provide some explanation, why this even be logical I will put them in separate post.
But once again - this is just speculation. It is not said in any manuals, documents and so on.)
(4.. maybe other ...)
Last edited:
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
But there are some arguments that support claims of Squirrel:
Arguments for:
1. Claims of person who had possibility to work on real simulator and he (Squirrel) saw that mode. He saw that targets were presented on IPV after launch. I supposed that somebody, from technical staff explain what happens and how this worked.
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-825368
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-851341
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-838234
The question is why do not believe in that? Of course, we can assume that something was understood incorrectly. And that simulator presents Mig-29SM device.
So what Squirrel saw - would be, maybe, just TWS mode for R-77 that does not need illumination.
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-838452
But the replay was that this is general functionality for Rubin (not Topaz?):
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-840890
Ok, that is. I understand that - this may not convincing. But they are other arguments.
Arguments for:
1. Claims of person who had possibility to work on real simulator and he (Squirrel) saw that mode. He saw that targets were presented on IPV after launch. I supposed that somebody, from technical staff explain what happens and how this worked.
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-825368
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-851341
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-838234
The question is why do not believe in that? Of course, we can assume that something was understood incorrectly. And that simulator presents Mig-29SM device.
So what Squirrel saw - would be, maybe, just TWS mode for R-77 that does not need illumination.
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-838452
But the replay was that this is general functionality for Rubin (not Topaz?):
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-840890
Ok, that is. I understand that - this may not convincing. But they are other arguments.
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
Okay(not multi-target engagement for N-001, lets close that topic)
Is some mode in which single target is illuminated, but radar antenna works in scan line mode, with possibility to refresh information about other targets.
First arguments "against":
What umm, so, N-019 yes N-001 no??
I could ask you, how would this mode be useful, how does R-27 not see wrong reflection, how does this fit with 1s update rate, how does this fit pattern of 7x tracking/illumination follows by 2 1/3rd sec datalink commands for total 1 sec. Obviously STT is needed for anything that isn’t a straight line so how is such a function toggled, etc. But I’m not going to seriously ask these becuase we are trying to close said topic after going around in circles for pages while I ask these questions and have them ignored
In case anyone missed it…..

Last edited:
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
2.
Second - is some testimony of technician, that was reached by Overscan. That technician is claimed to have experience with N-019EA model.
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434466
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434467
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434468
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434470
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434829
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434844
and so on.
Exact words from that technician are literally cited. They describe how DNP mode works. And if you read them, he confirms, more and less, claims of Squirrel. They are somehow consistent.
Sure, not everything is clear 100%. These comments may leave some questions.
The main is – how this may work – scanning mode with semi-active missile in terminal phase, how – illumination is done while antenna does not point directly target, by some sidelobe or sth?.
I think this is still not explained.
But If we believe these words – this should end discussion.
Before - I was skeptical. I thought - that that person just made mistake between -(searching) tracking and illumination of single the target and searching of many.
As in manuals, when refers DNP - there is cycle of "searching" - but in sense - emitting probing pulses. But thy can be both for updating single target position but also for searching airspace. So I assumed he was wrong, anybody can be.
Now, after getting all arguments for (no 1, 2, 3). It is hard to just ignore all of them.
In any case I think there is NO doubts what that person want to tell, us. He wanted just tell that DNP is some scanning mode. We cannot read that words in other way.
Let’s look on some fragments:
"...N019 goes to DNP mode and transmitter goes in special mode in which he combines quasi -continuous waveform and continuous wave illumination... "
later:
" is capable to work both in quasi -continuous waveform ( for airspace searching ) with as I wrote pulse and Doppler methods and continuous waveform with mono-pulse method , so in continuous wave illumination mode"
This word: "as I wrote" - refers to some previous post: (https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434467), exactly to this fragment:
"The regime SNP ( iz western fighters is mode TWS ) does not use mono- pulse but pulse and Doppler method of quasi -continuous waveform ."
So to summarize all: DNP uses, combines: from one hand : "quasi continues waveform" - so generally regular scanning (SNP), with RNP monopulse & continues illumination...
And later - the whole process is described...:
"So after the R-27R is or are launched radar begin to work in special tact pulses . First tact is for tracking ( tracking regime ) and lasts 20.48miliseconds , read carefully , first tact pulse that lasts 10.24 ms is used for airspace searching ,so for scanning of zone of airspace in exact number of rows horizontal and vertical with speed 57 or 70°/sec depending on mode of air space searching on russian OBZOR-SOPROVOZHDENIE : automatic or manual ."
.. and so on .. see the later part of this post. There is clearly described "black on white" how DNP works.
By they way OBZOR-SOPROVOZHDENIE - is searching - tracking. OBZOR _ REVIEV; СОПРОВОЖДЕНИЕ is something like tracking like in mode : СОПРОВОЖДЕНИЕ НА ПРОХОДЕ - СНП - SNP - well known mode.
I emphasize words: “airspace searching” , “scanning of zone of airspace in exact number of rows.” “mode of airspace searching”,– “automatic manual” – (the latter refers to scanning angular zone– that is different in manual and automatic mode.)
I emphasize them, just to make clear that that person talked deliberately about scanning, and searching targets and there are no doubts what he wanted to tell.
“So in first 10.24ms radar is searching and tracking aircraft in zone ( max 10 in SNP ) than in another 10.24ms tact pulse , radar tracks only target which is engaged with R-27R , R1 missile , `s .That is 20.48 miliseconds of tracking regime . This solo- tracking of egaged target help radar FCS to track his angular coordinates and any change in them will initiate the programme for radio-correction of missile fly-path with special radio-correcting signals in the first inertional phase of missiles fly path( 70% of all missile fly-path ) . Than you have CWI regime that lasts 30.72 ms ,this regime uses continuoes wave illumination of target that is engaged with those missile or missiles . The radar signals in this CWI -regime work on different working frequency than those in tracking regime and the signals that hit the target come back to the radar guided head in missile cone ( SARH as you know ) . This DNP regime lasts exactly one minute .”
I want to emphasize one more thing from the above fragment: this technician says, nothing about switching at some point to single target track. No. There is not like this >>there is TWS like processing and at some point – when the missile is close to the target – radar switches to single target track<<. No. There is just DNP scanning, all the time, from missile start until its impact (or until some predefined time (60s)). Period.
And summary from Overscan - that time:
“If I understand this correctly:
You start in SNP mode, up to 10 targets tracked in rough method.
You switch to RNP mode which uses monopulse CW to to precisely locate highest priority target and calculate launch parameters. For up to 10 seconds, the 9 other tracked targets are predicted on your display, but new targets are not discovered, full attention of radar is on trscking for missile launch.
If you now launch a missile, you switch to DNP mode which interleaves between search (10.24ms), track (20.48ms) and illumination (30.72ms) phases. The additional up to 9 targets can be relocated in rough tracking method (SNP) providing they are within the scan area, while the primary target continues to be tracked in high quality monopulse method and any changes in primary target position from initial launch prediction are sent to the missile via radio-correction.”
My interpretation: Precise tracking and is only when the main beam is "over target".
So this is literally: Track While Scan - while scanning, with just normal precision, only the main target is processed additionally with monopulse method.
So, according to that description - it is clear.
It's up to you believe that or not.
Second - is some testimony of technician, that was reached by Overscan. That technician is claimed to have experience with N-019EA model.
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434466
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434467
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434468
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434470
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434829
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434844
and so on.
Exact words from that technician are literally cited. They describe how DNP mode works. And if you read them, he confirms, more and less, claims of Squirrel. They are somehow consistent.
Sure, not everything is clear 100%. These comments may leave some questions.
The main is – how this may work – scanning mode with semi-active missile in terminal phase, how – illumination is done while antenna does not point directly target, by some sidelobe or sth?.
I think this is still not explained.
But If we believe these words – this should end discussion.
Before - I was skeptical. I thought - that that person just made mistake between -(searching) tracking and illumination of single the target and searching of many.
As in manuals, when refers DNP - there is cycle of "searching" - but in sense - emitting probing pulses. But thy can be both for updating single target position but also for searching airspace. So I assumed he was wrong, anybody can be.
Now, after getting all arguments for (no 1, 2, 3). It is hard to just ignore all of them.
In any case I think there is NO doubts what that person want to tell, us. He wanted just tell that DNP is some scanning mode. We cannot read that words in other way.
Let’s look on some fragments:
"...N019 goes to DNP mode and transmitter goes in special mode in which he combines quasi -continuous waveform and continuous wave illumination... "
later:
" is capable to work both in quasi -continuous waveform ( for airspace searching ) with as I wrote pulse and Doppler methods and continuous waveform with mono-pulse method , so in continuous wave illumination mode"
This word: "as I wrote" - refers to some previous post: (https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-434467), exactly to this fragment:
"The regime SNP ( iz western fighters is mode TWS ) does not use mono- pulse but pulse and Doppler method of quasi -continuous waveform ."
So to summarize all: DNP uses, combines: from one hand : "quasi continues waveform" - so generally regular scanning (SNP), with RNP monopulse & continues illumination...
And later - the whole process is described...:
"So after the R-27R is or are launched radar begin to work in special tact pulses . First tact is for tracking ( tracking regime ) and lasts 20.48miliseconds , read carefully , first tact pulse that lasts 10.24 ms is used for airspace searching ,so for scanning of zone of airspace in exact number of rows horizontal and vertical with speed 57 or 70°/sec depending on mode of air space searching on russian OBZOR-SOPROVOZHDENIE : automatic or manual ."
.. and so on .. see the later part of this post. There is clearly described "black on white" how DNP works.
By they way OBZOR-SOPROVOZHDENIE - is searching - tracking. OBZOR _ REVIEV; СОПРОВОЖДЕНИЕ is something like tracking like in mode : СОПРОВОЖДЕНИЕ НА ПРОХОДЕ - СНП - SNP - well known mode.
I emphasize words: “airspace searching” , “scanning of zone of airspace in exact number of rows.” “mode of airspace searching”,– “automatic manual” – (the latter refers to scanning angular zone– that is different in manual and automatic mode.)
I emphasize them, just to make clear that that person talked deliberately about scanning, and searching targets and there are no doubts what he wanted to tell.
“So in first 10.24ms radar is searching and tracking aircraft in zone ( max 10 in SNP ) than in another 10.24ms tact pulse , radar tracks only target which is engaged with R-27R , R1 missile , `s .That is 20.48 miliseconds of tracking regime . This solo- tracking of egaged target help radar FCS to track his angular coordinates and any change in them will initiate the programme for radio-correction of missile fly-path with special radio-correcting signals in the first inertional phase of missiles fly path( 70% of all missile fly-path ) . Than you have CWI regime that lasts 30.72 ms ,this regime uses continuoes wave illumination of target that is engaged with those missile or missiles . The radar signals in this CWI -regime work on different working frequency than those in tracking regime and the signals that hit the target come back to the radar guided head in missile cone ( SARH as you know ) . This DNP regime lasts exactly one minute .”
I want to emphasize one more thing from the above fragment: this technician says, nothing about switching at some point to single target track. No. There is not like this >>there is TWS like processing and at some point – when the missile is close to the target – radar switches to single target track<<. No. There is just DNP scanning, all the time, from missile start until its impact (or until some predefined time (60s)). Period.
And summary from Overscan - that time:
“If I understand this correctly:
You start in SNP mode, up to 10 targets tracked in rough method.
You switch to RNP mode which uses monopulse CW to to precisely locate highest priority target and calculate launch parameters. For up to 10 seconds, the 9 other tracked targets are predicted on your display, but new targets are not discovered, full attention of radar is on trscking for missile launch.
If you now launch a missile, you switch to DNP mode which interleaves between search (10.24ms), track (20.48ms) and illumination (30.72ms) phases. The additional up to 9 targets can be relocated in rough tracking method (SNP) providing they are within the scan area, while the primary target continues to be tracked in high quality monopulse method and any changes in primary target position from initial launch prediction are sent to the missile via radio-correction.”
My interpretation: Precise tracking and is only when the main beam is "over target".
So this is literally: Track While Scan - while scanning, with just normal precision, only the main target is processed additionally with monopulse method.
So, according to that description - it is clear.
It's up to you believe that or not.
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
For clarity - Squirrel claimed that N-019 can scan during illuminating R-27R(1) for single target.What umm, so, N-019 yes N-001 no??
So one target is engaged with R-27R(1) missile(s). But in that mode - search for other targets is possible.
So after single target track - radar switches to scan mode - in which R-27 missiles are guided. So there is illumination provided.
And I provided arguments for that claims and against.
Of course - N-001 probably is similar or the same in this manner as N-019.
Here I say nothing about multi-tracking capability.
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
This does not affirm squirrel, who believed quasi continues was something entirely replacing monopulse.later:
" is capable to work both in quasi -continuous waveform ( for airspace searching ) with as I wrote pulse and Doppler methods and continuous waveform with mono-pulse method , so in continuous wave illumination mode"
What is being said here is that SNP does not need monopulse. It can judge target azimuth and elevation by the timing of the radar return. This is partly why it isn’t so precise.
Once the radar beam is on target, then monopulse is helpful to narrow the exact coordinates within the beam width
It is simply a misunderstanding and assumption
I don’t know if you have read the MiG-29B technical book. But if you had, you would likely be aware that the radar is using the same waveform to detect and find target in search as in RNP. This is why the technician says searching, becuase it is using a waveform to “search” for the target coordinates."...N019 goes to DNP mode and transmitter goes in special mode in which he combines quasi -continuous waveform and continuous wave illumination... "
later:
" is capable to work both in quasi -continuous waveform ( for airspace searching ) with as I wrote pulse and Doppler methods and continuous waveform
It is NOT implying that it is a search MODE or scanning.
How long is this “search scan” that the technician mentions? 10.24 ms. How far do you think an antenna with 50-70 deg/s max movement can scan in 10.24 ms? 0.5-0.7 degrees
So this is literally: Track While Scan - while scanning, with just normal precision, only the main target is processed additionally with monopulse method.
If you want to scan about 0.5-0.7 degrees to the sides of your 3.5 degree beam, sure.
It needs to send out its scan waveform in the chosen PRF to find the target before it can illuminate and/or sent out datalink corrections, that’s all that’s happening in those grand 10.24ms
Last edited:
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
Last argument for:
3.
Some documentation from German , manual
This German manual is like many other documents of this type. Presents the same modes and so on. But there are surprisingly just two sentences ( I will put them with some sentences before, just to put them in context)
“In operating modes "B" and "D", an additional mode, the operating mode "CHI", can be used to achieve a high degree of surprise to the target. This mode ensures the automatic identification of the "most dangerous" target from the 10 maximum selectable targets based on the criteria of - shortest distance and - highest approach speed, and automatically tracks it in overview mode until the maximum firing range is reached. (…) Automatic target tracking includes the alignment of the seeker heads of the guided missiles and their launch preparation. If the maximum firing range is reached, the FMVK automatically switches to target operation and the missile is launched when the launch button is pressed and the launch conditions are met. This significantly reduces the time for the enemy to react to the detected switch to target operation before engaging them.”
And later:
"Im Gegensatz zu anderen Funkmeßvisieren der Jagdflugzeuge der NVA
bleibt beim Funkmeßvisier N-019 nach dem Übergang zum Zielbetrieb
auf eines der im Ortungsbereich vorhandenen Luftziele die Information über die anderen Luftziele erhalten, was die Beurteilungder Luftlage auch in dieser Betriebsart gewährleistet."
"Unlike other radar sights used on NVA fighter aircraft,
the N-019 radar sight retains information about other targets within its detection range after switching to target mode, thus ensuring accurate assessment of the air situation even in this mode."
"Das trifft auch dann zu, wenn eine Rakete R-27R gestartet wurde, weil dann
ein ständiger schneller Wechsel zwischen Zielbeleuchtung und
Zielbetrieb erfolgt, der sich auf die Darstellung nicht auswirkt."
"This also applies even when an R-27R missile has been launched, because then
a constant, rapid switching between target illumination and target operation occurs, which does not affect the display."
You can also those two sentences them : when radar starts tracking single target, you can still evaluate tactical situation, because you can see other targets. Just like that. And later – after missile launch – you still can see other targets because it mixed target operation and illumination. And presentation on display has not changed.
And it says nothing about limited period of time, or approximation, extrapolation.
Just display is the same as before. And before was scan time. And based on that you can assess tactical situation. You cannot assess tactical situation using extrapolated data – as this is reliable only for several seconds. Using them later – might be more misleading than constructive. So, the only option is that – despite tracking or illuminating the single target – still information about other targets is “fresh”. So that information needs to be refreshed somehow.
So maybe this does not confirm 100% that there is scanning, while tracking a single target. But in any case, information about other targets are being refreshed. And in scanning – while tracking / illumination – also information about other targets are refreshed – so this somehow is consistent.
If we have only 2 sentences vs the whole Internet.. we can spend slightly more time on them.
So yes, this translation can suggest that only information, known in past is preserved. Thus, only existing tracks are extrapolated.
But:
Translation "retains information" - is translation of word "erhalten"
This word means: preserved but the main meaning is rather: "get" "receive" "obtain"
(You can try to see google translate definition)
"beim Funkmeßvisier N-019 nach dem Übergang zum Zielbetrieb
auf eines der im Ortungsbereich vorhandenen Luftziele die Information über die anderen Luftziele erhalten,"
"with the N-019 radar sight, after switching to target operation
on one of the aerial targets present in the detection range, information about the other aerial targets is received,"
Second part is:
"was die Beurteilungder Luftlage auch in dieser Betriebsart gewährleistet."
"...,thus ensuring (accurate) assessment of the air situation"
"gewährleistet" -> "guaranteed"
If we assume "approximation" , "extrapolation" , how word : "ensuring" - can be used with them?
("accurate" - it turns out something somehow added by translator)
The next sentence is:
"This also applies even when an R-27R missile has been launched, because then
a constant, rapid switching between target illumination and target operation occurs, which does not affect the display."
“This” – relates to the previous sentence, so:
“radar sight retains information about other targets within its detection range after switching to target mode, thus ensuring accurate assessment of the air situation”
Also apply to illumination mode.
Then is to somehow explained how this is performed. Nothing said about extrapolation. It is said only about “rapid switching” (like this sequence 20ms search .. 30ms illumination)
But those two sentences can be "read" also other way:
First sentence - is about "preserving" information. It is not said about scanning. Only preserving.
The second sentence says about tracking of target that is interleaved with illumination of that target. So work on single target.
But then - once again - "this not affect display" - So what does it mean? Single target is still visible? And not like in older design ?
(Was in Mig-23, when illuminating missile , was in that mode target loose from display? Or at least distance to target, as there was not mixed work for distance search and illumination?)
And, if you read the whole German document, it is somehow "striking" that - there are many options and modes described. There are diagrams with scan zones, views on ILS/IPV. But still nothing for illumination mode. Nothing that can support claims : that targets are preserved.
And those are only two sentences - without any :"wider" supporting context.
And that is all. I will not provide any conclusions.
3.
Some documentation from German , manual
This German manual is like many other documents of this type. Presents the same modes and so on. But there are surprisingly just two sentences ( I will put them with some sentences before, just to put them in context)
“In operating modes "B" and "D", an additional mode, the operating mode "CHI", can be used to achieve a high degree of surprise to the target. This mode ensures the automatic identification of the "most dangerous" target from the 10 maximum selectable targets based on the criteria of - shortest distance and - highest approach speed, and automatically tracks it in overview mode until the maximum firing range is reached. (…) Automatic target tracking includes the alignment of the seeker heads of the guided missiles and their launch preparation. If the maximum firing range is reached, the FMVK automatically switches to target operation and the missile is launched when the launch button is pressed and the launch conditions are met. This significantly reduces the time for the enemy to react to the detected switch to target operation before engaging them.”
And later:
"Im Gegensatz zu anderen Funkmeßvisieren der Jagdflugzeuge der NVA
bleibt beim Funkmeßvisier N-019 nach dem Übergang zum Zielbetrieb
auf eines der im Ortungsbereich vorhandenen Luftziele die Information über die anderen Luftziele erhalten, was die Beurteilungder Luftlage auch in dieser Betriebsart gewährleistet."
"Unlike other radar sights used on NVA fighter aircraft,
the N-019 radar sight retains information about other targets within its detection range after switching to target mode, thus ensuring accurate assessment of the air situation even in this mode."
"Das trifft auch dann zu, wenn eine Rakete R-27R gestartet wurde, weil dann
ein ständiger schneller Wechsel zwischen Zielbeleuchtung und
Zielbetrieb erfolgt, der sich auf die Darstellung nicht auswirkt."
"This also applies even when an R-27R missile has been launched, because then
a constant, rapid switching between target illumination and target operation occurs, which does not affect the display."
You can also those two sentences them : when radar starts tracking single target, you can still evaluate tactical situation, because you can see other targets. Just like that. And later – after missile launch – you still can see other targets because it mixed target operation and illumination. And presentation on display has not changed.
And it says nothing about limited period of time, or approximation, extrapolation.
Just display is the same as before. And before was scan time. And based on that you can assess tactical situation. You cannot assess tactical situation using extrapolated data – as this is reliable only for several seconds. Using them later – might be more misleading than constructive. So, the only option is that – despite tracking or illuminating the single target – still information about other targets is “fresh”. So that information needs to be refreshed somehow.
So maybe this does not confirm 100% that there is scanning, while tracking a single target. But in any case, information about other targets are being refreshed. And in scanning – while tracking / illumination – also information about other targets are refreshed – so this somehow is consistent.
If we have only 2 sentences vs the whole Internet.. we can spend slightly more time on them.
So yes, this translation can suggest that only information, known in past is preserved. Thus, only existing tracks are extrapolated.
But:
Translation "retains information" - is translation of word "erhalten"
This word means: preserved but the main meaning is rather: "get" "receive" "obtain"
(You can try to see google translate definition)
"beim Funkmeßvisier N-019 nach dem Übergang zum Zielbetrieb
auf eines der im Ortungsbereich vorhandenen Luftziele die Information über die anderen Luftziele erhalten,"
"with the N-019 radar sight, after switching to target operation
on one of the aerial targets present in the detection range, information about the other aerial targets is received,"
Second part is:
"was die Beurteilungder Luftlage auch in dieser Betriebsart gewährleistet."
"...,thus ensuring (accurate) assessment of the air situation"
"gewährleistet" -> "guaranteed"
If we assume "approximation" , "extrapolation" , how word : "ensuring" - can be used with them?
("accurate" - it turns out something somehow added by translator)
The next sentence is:
"This also applies even when an R-27R missile has been launched, because then
a constant, rapid switching between target illumination and target operation occurs, which does not affect the display."
“This” – relates to the previous sentence, so:
“radar sight retains information about other targets within its detection range after switching to target mode, thus ensuring accurate assessment of the air situation”
Also apply to illumination mode.
Then is to somehow explained how this is performed. Nothing said about extrapolation. It is said only about “rapid switching” (like this sequence 20ms search .. 30ms illumination)
But those two sentences can be "read" also other way:
First sentence - is about "preserving" information. It is not said about scanning. Only preserving.
The second sentence says about tracking of target that is interleaved with illumination of that target. So work on single target.
But then - once again - "this not affect display" - So what does it mean? Single target is still visible? And not like in older design ?
(Was in Mig-23, when illuminating missile , was in that mode target loose from display? Or at least distance to target, as there was not mixed work for distance search and illumination?)
And, if you read the whole German document, it is somehow "striking" that - there are many options and modes described. There are diagrams with scan zones, views on ILS/IPV. But still nothing for illumination mode. Nothing that can support claims : that targets are preserved.
And those are only two sentences - without any :"wider" supporting context.
And that is all. I will not provide any conclusions.
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
Yes, I am aware. There is just scanning. SNP is just additional processing of data from scan mode.I don’t know if you have read the MiG-29B technical book. But if you had, you would likely be aware that the radar is using the same waveform to detect and find target in search as in RNP. This is why the technician says searching, becuase it is using a waveform to “search” for the target coordinates.
Well. I will not discuss with you. Those are not my words. But he described DNP mode quite precisely. It is scanning.It is NOT implying that it is a search MODE or scanning.
Well - for sure - this explanation does not explain all. There are still questions: how this can illuminate while main beam is not pointing target? Yes. But generally - he describe scanning mode. You can not believe. You can say - that person mixed just scannig mode with illumination - cause, in ilumination mode
Agree. I did the same arguments that time - you can see that comments.How long is this “search scan” that the technician mentions? 10.24 ms. How far do you think an antenna with 50-70 deg/s max movement can scan in 10.24 ms? 0.5-0.7 degrees
So no. It it not like - 20ms scanning... then magically array move in some single ms to target position for illumination... than back
for scanning.
No... It is is rather this is just ordinary scan line - with just phases of "illumination"/monopulse tracking and scanning.
How this may work. I do not know.
I was trying to explain "to myself" in many posts above. This would be only possible if illumination is somehow "flood" like, just like Overscan suggested that time. So phase of search and track - is done by the main array, illumination by flood.
(Or ilumination is done by main antenna when that antenna points towards target. And by flood antenna - just "to fill gaps", when the main antenna is not pointing target.
But this is just my explanation.
To be honest, I just do not know, it is not explained.
But, read all sentences, from beginning, till end. That technician said : it is possible. You can just deny. You can say - he is wrong.If you want to scan about 0.5-0.7 degrees to the sides of your 3.5 degree beam, sure.
It needs to send out its scan waveform in the chosen PRF to find the target before it can illuminate and/or sent out datalink corrections, that’s all that’s happening in those grand 10.24ms
Maybe.
Ok. I will not discuss this topic long time.
This is my last post in this topic.
Last edited:
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
And presentation on display has not changed.
And, if you read the whole German document, it is somehow "striking" that - there are many options and modes described. There are diagrams with scan zones, views on ILS/IPV. But still nothing for illumination mode. Nothing that can support claims : that targets are preserved.
Another German manual has them. RNP/DNP shows elevation and azimuth, search shows range vs azimuth, two entirely different scopes
Scanning for ONE targethe described DNP mode quite precisely. It is scanning.
Yeah cuz maybe it doesn’tno... rather this is just ordinary scan line - with just phases of "ilumination"/monopulse tracking and scanning. How this may work.
I do not know.
I did. How does him saying “the radar scans for one target for 10.24 ms” automaticallyBut, read all sentences, from beginning, till end. That technician said : it is possible. You can just deny. You can say - he is wrong.
Maybe.
Equal all this doubt that it’s scanning for other targets despite a mountain of evidence against it??
It’s easy to understand that that radar still needs to find and update target coordinates before illumination/datalink, it can’t find Target while doing these things, so it sends out “search/scanning pulses for 10.24ms” to update the target track.
Radar searching for a target does not mean it is scanning in horizontal rows for more then one target. You can “search” for a single person and keep yours eyes on them. Do you really think that becuase he said it needs to do 10.24 ms of search/scanning? Like I said, if you read MiG-29B, the waveform used for search mode and RNP is identical. A lock still needs to periodically search/scan to update the target position
Scorpion82
ACCESS: Secret
- Joined
- 20 May 2006
- Messages
- 308
- Reaction score
- 633
Gentlement you should get over the "scanning" part. How do you track a target? By detecting it and correlating it with a previous detection. You need to confirm a target twice to initiate a track, thereafter the calculated track parameters are used to predict the target's likely position, based on extrapolation, during the next scan of that area. If the target is redetected and falls within the estimated range/velocity gates then it's considered to be the same target and the track gets updated accordingly. The longer the time between revisits, the greater the probability that a track is lost, if it behaves in a non-cooperative manner, i.e. changing airspeed, altitude and/or heading. For targeting and more specifically for guidance you want a track that is as stable and up to date as possible. During the initial fly-out phase of a missile, more sporadic updates are sufficient as the distance to the target is long and minor course corrections by the missile are sufficient to adapt to changes in the targets trajectory. The closer the missile gets, the larger the necessary course corrections and the warhead fuze has a limited distance to work, so the missile needs continous uninterrupted (meaning not seconds) guidance in the terminal phase to ensure that it hits its target. For AHR missiles the problem is solved, as these are using their own radar seekers to take over and track targets by themselves, SAHR missile in contrast rely on the illumination from the launch aircraft and if that's not continuous the missile's pk is essentially ZERO.
I think that the continuation of this discussion is pretty much pointless, after 4 months! If not even basic principles of radar operations are understood by some, this discussion is even more pointless. So give it a rest!
I think that the continuation of this discussion is pretty much pointless, after 4 months! If not even basic principles of radar operations are understood by some, this discussion is even more pointless. So give it a rest!
Scorpion82
ACCESS: Secret
- Joined
- 20 May 2006
- Messages
- 308
- Reaction score
- 633
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
I have added two German manuals to my repo here https://drive.google.com/drive/folders/18FZDb2icxZ-MKQDC8Y2AIHYQPc5XR-jn
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
Well, I would not write this better.Gentlement you should get over the "scanning" part. How do you track a target? By detecting it and correlating it with a previous detection. You need to confirm a target twice to initiate a track, thereafter the calculated track parameters are used to predict the target's likely position, based on extrapolation, during the next scan of that area. If the target is redetected and falls within the estimated range/velocity gates then it's considered to be the same target and the track gets updated accordingly. The longer the time between revisits, the greater the probability that a track is lost, if it behaves in a non-cooperative manner, i.e. changing airspeed, altitude and/or heading. For targeting and more specifically for guidance you want a track that is as stable and up to date as possible. During the initial fly-out phase of a missile, more sporadic updates are sufficient as the distance to the target is long and minor course corrections by the missile are sufficient to adapt to changes in the targets trajectory. The closer the missile gets, the larger the necessary course corrections and the warhead fuze has a limited distance to work, so the missile needs continous uninterrupted (meaning not seconds) guidance in the terminal phase to ensure that it hits its target. For AHR missiles the problem is solved, as these are using their own radar seekers to take over and track targets by themselves, SAHR missile in contrast rely on the illumination from the launch aircraft and if that's not continuous the missile's pk is essentially ZERO.
I think that the continuation of this discussion is pretty much pointless, after 4 months! If not even basic principles of radar operations are understood by some, this discussion is even more pointless. So give it a rest!
But this not exclude possibility that continues illumination is not done by the main "pencil" beam (only).
I have added two German manuals to my repo here https://drive.google.com/drive/folders/18FZDb2icxZ-MKQDC8Y2AIHYQPc5XR-jn
Actually - some sentences that can suggest "preserving air situation" comes from another document.
This is some material for training.
See post https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-873714 - document is described there as preliminary translation. It is stated 1989 but
There is also document attached with my OCR. Orginal document - was attached earlier in this thread.
The sentences are in pages 55 and 56. On page 55 there are sentences about SNP. Later -the two mentioned sentences.
And document provided by Aeria (I am talking about those , in German, orginal language) - this actual flight manual.
I read them now (ok rather look though) , at lest sections related to using radar.
And guess what, I found nothing that says clearly that there are some targets preserved while tracking.
I read fast part of this document, related to radar. Maybe I missed sth , but rather not. You can try by yourself .
But guess what - this document is not consistent with document presented earlier. At least in point:
Page 8/193, there is stated that (note there are 2 documents in this scan! - and that page relates to pages from second document, somewhere 4/5 of scroll down)

"
f) der Schalter AlI - OTKI. - AIIK zum Umschalten der Betriebs-
arten des Funkmeßzielkomplexes bei aktiven Störungen:
in der Schaltstellung All wird die Anzeige der aktiven Stö-
rung auf der Blickfelddarstellung gewährleistet:
die Schaltstellung AIIK ist nicht in Funktion."
"
f) The AlI - OTKI. - AIIK switch for switching the operating
modes of the radio target complex in case of active interference:
in the All position, the indication of the active interference on the display is ensured:
the AIIK position is not functional."
And in "student document", I mentioned before - it is stated that - in position APK (AIIK) - there is turn on compensation channel.
I had post about that
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-877398
And Squirrel ask if this mode is working on N-019EA ?
https://www.secretprojects.co.uk/threads/mig-29-avionics.102/post-877400
And in flight manual it is said that APK is not working...
Well, maybe - this "teaching document", was translated based on some materials provided from Soviets. And they provided not actual manual for N-019EA but some materials for own system (?)
Document provided by Aeria (this actual manual) - is very interesting. Sometimes provided information not known before.. But some interesting fragments:
Page 29:

"Bei einer Unterbrechung der automatischen Zielbegleitung nach
dem Abschuß von Raketen R-27R aus geringen Entfernungen ist
zum Sichern der Anstrahlung des Zieles im Ubersichtsbetrieb
energisch auf das Ziel einzukurven. Aus dem Angriff ist nach
der Vernichtung des Zieles herauszugehen!"
"If automatic target tracking is interrupted after
the launch of R-27R missiles at close range,
to ensure illumination of the target in oversight mode,
the aircraft must vigorously steer towards the target. The attack must be terminated after
the target has been destroyed!"
Does this suggest that use of some "flood mode"? At lest after loosing track at close distance? Or how to read this?
Ok, from my side - it is definitely EOT.
Last edited:
Scorpion82
ACCESS: Secret
- Joined
- 20 May 2006
- Messages
- 308
- Reaction score
- 633
Well, I would not write this better.
But this not exclude possibility that continues illumination is not done by the main "pencil" beam (only).
It most likely is, because you wouldn't necessarily need to time share transmissions, if it wouldn't be the case. Unless you have a dedicated illuminator that's operational independent from the radar, unless interference rules it out.
And in flight manual it is said that APK is not working...
It's not entirely unusual that theoretical switch functions are described, even if the function is not implemented.
Well, maybe - this "teaching document", was translated based on some materials provided from Soviets. And they provided not actual manual for N-019EA but some materials for own system (?)
Could be yes.
Page 29:
View attachment 803220
"Bei einer Unterbrechung der automatischen Zielbegleitung nach
dem Abschuß von Raketen R-27R aus geringen Entfernungen ist
zum Sichern der Anstrahlung des Zieles im Ubersichtsbetrieb
energisch auf das Ziel einzukurven. Aus dem Angriff ist nach
der Vernichtung des Zieles herauszugehen!"
"If automatic target tracking is interrupted after
the launch of R-27R missiles at close range,
to ensure illumination of the target in oversight mode,
the aircraft must vigorously steer towards the target. The attack must be terminated after
the target has been destroyed!"
Does this suggest that use of some "flood mode"? At lest after loosing track at close distance? Or how to read this?
That's really crude German language, either it has been translated by a non-native German speaker, or the translater had little clue of what he was translating and tried it 1:1. But yes that passage implies that the radar switches to a kind of flood mode, that's apparently centred around boresight, hence the need to keep the nose pointed at the target until missile impact. The "Angriff - Attack" part at the end essentially implies that the pilot has to manually switch to another mode after missile impact. Or in other words, the flood mode isn't terminated automatically, which is invitable as the actual target is not tracked by the radar anymore.
EDIT:
Thanks for the reference to the German paper. It shall be noted that the study paper for the military academy of the former East-German Airforce states in its foreword that the information about the MiG-29's radar included is based on a preliminary translation of the technical documentation. It explains why the language used is somewhat untypical and it could well be that not all information are necessarily correct, based on the preliminary translation. In any case it's not always consistent and sometimes a bit hard to interpret correctly, even for a native german speaker like myself.
Last edited:
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
I do not know why you say this, this document is in my repo and I have read it many timesActually - some sentences that can suggest "preserving air situation" comes from another document.
This is some material for training.
See post
There is no flood mode but manuals state that illumination can happen in 3 states to various degrees:Does this suggest that use of some "flood mode"? At lest after loosing track at close distance? Or how to read this?
1. Directly inside radar beam
2. By reflections of normal scan mode, this can happen either in search mode if target is hit by beam, or even if IRST is cueing radar and radar is attempting to lock and thus reflecting off the target
3. The sidelobes of the radar beam can illuminate for the missile at shorter ranges
Of course, depending on all 3 factors, the “amount of time” or “number of guidance updates” the missile can make will be limited to how much time the target is inside the beam, the strength of the sidelobes, the number of times hit by the beam, etc
There is no switching or mode, it is simply that the R-27R/ER is flexible enough seeker to use any reflections of the target by the seeker whether it’s in illumination mode or not. Illumination mode simply gives the highest quality fastest speed of updates and most range.
In other manuals, you will find the same passage in differing versions. Some like the Russian manual are explicit “Turn towards target and attempt to regain lock.”
Some when they say “turn towards target in search mode and illuminate target” might more precisely mean “turn towards target and restart attack as normal to illuminate the target.”
Either way, if you are real pilot, you want to try to get lock back as soon as possible for most successful kill. If R-27R uses reflection from scan or sidelobe before you get successful lock that’s great.
DNP lasts 60 seconds no matter what. As long as you can lock before terminal or impact the illumination won’t stop until the 60 seconds is over or the radar turned off.
Su-27 will turn off illumination as soon as lock breaks becuase with so many more missiles it needs to make room for datalink channels of missiles fired next.
EDIT:
Thanks for the reference to the German paper. It shall be noted that the study paper for the military academy of the former East-German Airforce states in its foreword that the information about the MiG-29's radar included is based on a preliminary translation of the technical documentation
Very valuable info!
Last edited:
Шурави1983
ACCESS: Confidential
- Joined
- 12 May 2025
- Messages
- 59
- Reaction score
- 58
1.The terminology 'monopulse' means kind of signal processing, not signal itself. It means find the angle of signal by comparing the amplitude or phase received by two antennas, with different gain pattern(by direction.) You can have a 'monopulse' seeker, with a continuous illumination signal, a quasi-continuous signal, even a search signal (in case of HOJ seekers.)
2.The 'liter' frequency (a specified carrier frequency) is shared between search, track, illumination and radio correction command.
3.One can check the graphs below, it clearly showed the time occupation of search, track and command/illumination:
Velocity Search(with a specified PRF, 3 PRF a period, for an azimuth line, no accurate range) - 10.24ms
Frequency Modulation Ranging(Chirp) - 20.48ms
Tracking(repeatly doing FMR) - 20.48ms
Illumination - 30.72ms
Radio correction command - about 1s a period, one command occupies 1/3 of this period. The rest of the period is for tracking, etc. You can send 2 correction command in a period (for 2-missile-1-target or 2-missile-2-target? The least estimation - previous.).
SImply, to 'STT' a target, you need repeatly 'TWS' it, thus, as one measurement of 'TWS' provide data with error, repeat measurement filts the error.
Hope this helps your the questions. o7
2.The 'liter' frequency (a specified carrier frequency) is shared between search, track, illumination and radio correction command.
3.One can check the graphs below, it clearly showed the time occupation of search, track and command/illumination:
Velocity Search(with a specified PRF, 3 PRF a period, for an azimuth line, no accurate range) - 10.24ms
Frequency Modulation Ranging(Chirp) - 20.48ms
Tracking(repeatly doing FMR) - 20.48ms
Illumination - 30.72ms
Radio correction command - about 1s a period, one command occupies 1/3 of this period. The rest of the period is for tracking, etc. You can send 2 correction command in a period (for 2-missile-1-target or 2-missile-2-target? The least estimation - previous.).
SImply, to 'STT' a target, you need repeatly 'TWS' it, thus, as one measurement of 'TWS' provide data with error, repeat measurement filts the error.
Hope this helps your the questions. o7
Attachments
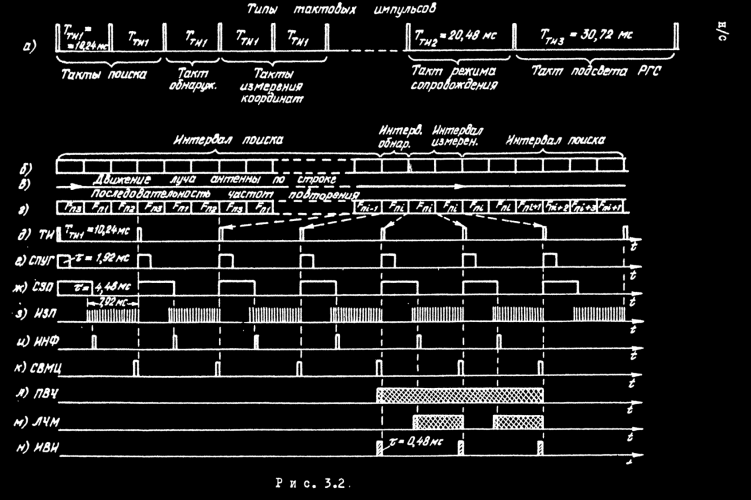
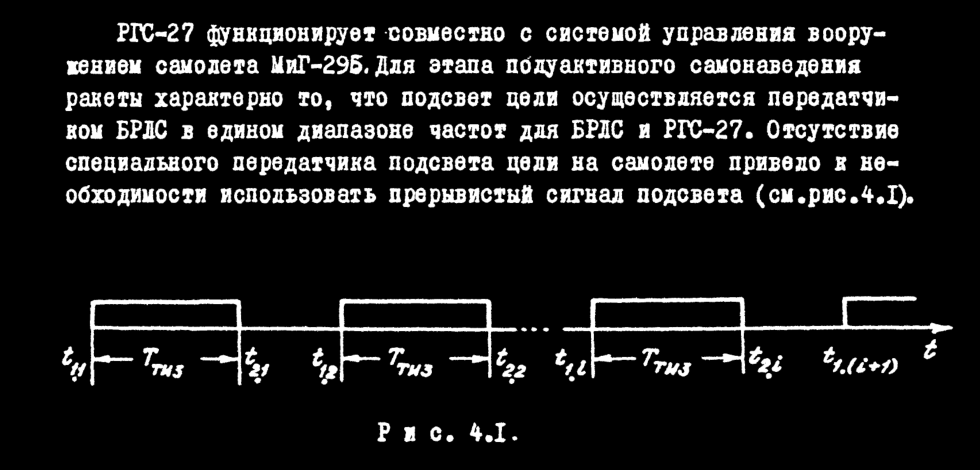
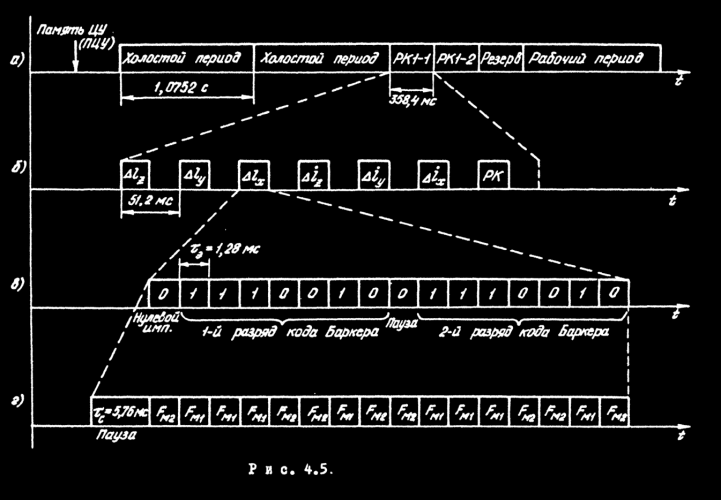
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
I tried to explain that your first picture at the top is only showing illlumination cycle as an example, and it is not implying illumination happens in same sequence as search in one mode. The chapter this is from is entirely about search mode and this just an example.
What I like is it clarifies that after the datalink is no longer needed, it is simply cycling through tracking (detection and updating of coordinates) and illumination. And it does this 7x in a row before transmitting datalink, which takes up almost exactly 1/3rd of a second to complement the 2/3rd seconds needed for 2x datalink commands.
I always thought it was genius that datalink only updates the target velocity vector. The missile is uploaded with target velocity vector at launch, datalink merely updates this, and it guides off the velocity vector it computes from launch+datalink using proportional guidance the same as if it saw the target. Thus the missile follows the same trajectory at all times, the only difference with datalink being update rate of 1 hz.
Using datalink to command the missile movement directly seems quaint by comparison!
Шурави1983
ACCESS: Confidential
- Joined
- 12 May 2025
- Messages
- 59
- Reaction score
- 58
Yep, it just showed the length of interval(on time).I tried to explain that your first picture at the top is only showing illlumination cycle as an example, and it is not implying illumination happens in same sequence as search in one mode. The chapter this is from is entirely about search mode and this just an example.
And you can see how common is the Ts-100/101 with the modern 'universal' processor. Yes, the ALU for multipling and dividing is isolated from ALU and only receive data from microcode BUS (ALU receive things from both control unit and microcode unit), maybe they cannot integrate it due to technology left-behind, maybe it's just customized for FFT computation.And the operations can be mostly customized by the softwares
Indeed, Ts-100 is only for signal processing, СЕИ(general control and interface) one is Orbita-20, but they are at same level. So that's my point, as the technical possibility exist(if you can spare up the frequecy occupation/time occupation/memory/computation resources... for the second target/ for re-locking target, etc), the rest are on software design - how do the computer control the other subsystems.
Attachments
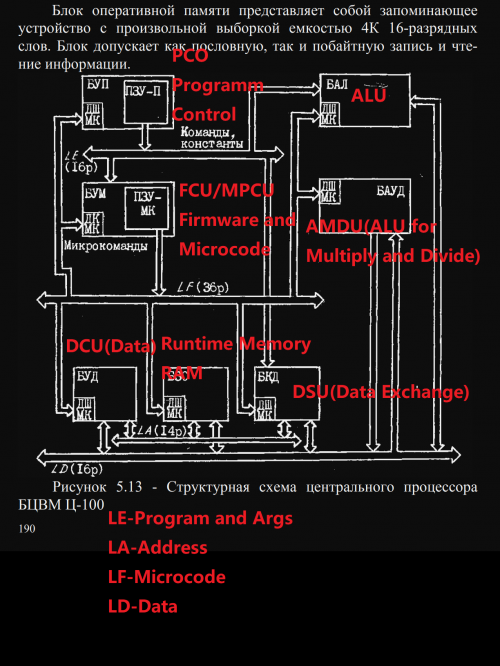
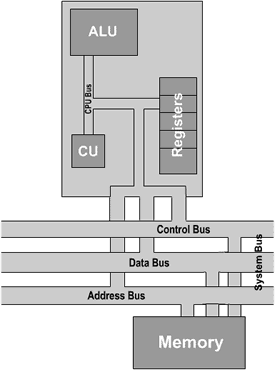
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
Do you think computer processing is reason that certain issues exist such as, not being able to interface IFF with IRST so that it would show IFF either on IRST target or when radar is locked in COOP mode and IRST mode selected (MiG-23/25 allowed any IRST target to be interrogated)? Or such as radar illumination switch needing to be put in Dummy/EKV for IRST modes with COOP turned on and Radar only working with IRST in pursuit/close combat mode?Yep, it just showed the length of interval(on time).
Last edited:
LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
Well. My understanding of how "normal" semi-active missile works is: radar points with main pencil -like (in case of N-019) 3.5 deg beam-with on target. It interleaves - illumination and tracking. (In case of N-019 its 22ms vs 33 ms ). Tracking is to keep that main antenna to follow target and know where target is , and illumination - just to guide missile. Antenna points directly and constantly on single target. And that is "normal". Why to use the main antenna for illumination? Well it obvious - it increase energy reflected from target. If you are 30 or more km from target , and your semi active missile has just 20 cm of diameter (not 0.7...0.9 or 1 m like for main array) - it is important to get lock from missile at long range.It most likely is, because you wouldn't necessarily need to time share transmissions, if it wouldn't be the case. Unless you have a dedicated illuminator that's operational independent from the radar, unless interference rules it out.
And you may have second array - just ordinary "horn". This is flood antenna. It has wide beam. I do not know how much, but lets say 30deg, 45 deg or more. It is used in western desing like APG- 63 -65 --70 and so on. It is just auxiliary way for providing illumination. Not main. It is used just if target is in close ranges, visual one. For instant illumination and launch Aim-7 missiles, without locking target. This is also "normal" case but some other mode.
But flood antenna is not normally used for beyond visual range shots. Why? Simple mathematics can tell. If the main , pencil beam beamwitdh is 3.5 deg. if we Increase beam width 10times , "angular area" will increase also 100 times (it is square).
So how range that semi-active missile can detect target changes? Normal radar equation is fourth root. But for semiactive missiles - is just root. So detection range also decreases also 10 times. For example for range 40km (Aim-7) in flood mode is only 4km. Thats why flood mode is not to be used in long range. Is my thinking wrong? The same applies to R-27R. It is stated that medium size target (fighter) is detected from 25km (and it does not matter here if it is detected "on trajectory" or "on launcher". But BTW if this "25km" means - on trajectory , on lanucher is like 39km), so for flood this would be 2.5 km.
So my understanding, "normal" ilumination is via main array. Fighter constantly tracks target and illuminate them.
But please tell me if this thinking is not true. I noticed that for F-4 that might be different.
(And if for any case - normal is to use some "flood" antenna, or some sidelobes from main array. Well - so whats the problem ? Main antenna just track single target , or many in TWS. And Missile - just is iluminated by flood array.)
Yes. English version is nothing more than automatic translation. But it is nice that you are native German speaker.It's not entirely unusual that theoretical switch functions are described, even if the function is not implemented.
Could be yes.
That's really crude German language, either it has been translated by a non-native German speaker, or the translater had little clue of what he was translating and tried it 1:1. But yes that passage implies that the radar switches to a kind of flood mode, that's apparently centred around boresight, hence the need to keep the nose pointed at the target until missile impact. The "Angriff - Attack" part at the end essentially implies that the pilot has to manually switch to another mode after missile impact. Or in other words, the flood mode isn't terminated automatically, which is invitable as the actual target is not tracked by the radar anymore.
I had the same impression, that illumination - is somehow not directed but kept somehow in axis of fighter (as flood or just other way) And pilot has to move towards target.
There is no flood mode but manuals state that illumination can happen in 3 states to various degrees:
1. Directly inside radar beam
2. By reflections of normal scan mode, this can happen either in search mode if target is hit by beam, or even if IRST is cueing radar and radar is attempting to lock and thus reflecting off the target
3. The sidelobes of the radar beam can illuminate for the missile at shorter ranges
Do you want to say that R-27R ilumination can be from sidelobes? Can you provide exact source and citation?
Where can be found?
Just to be clear. As every semiactive missile - R-27R receives signal reflected from target - by array from front. But also - illumination directly from own fighter - this signal is reference signal. Additionally R-27R receives corrections directly from fighter.
And for direct signal for fighter (reference or command) - should this can be by sidelobes or whetever. I agree
But illumination of target from fighter? By sidelobes?
Of course, depending on all 3 factors, the “amount of time” or “number of guidance updates” the missile can make will be limited to how much time the target is inside the beam, the strength of the sidelobes, the number of times hit by the beam, etc
There is no switching or mode, it is simply that the R-27R/ER is flexible enough seeker to use any reflections of the target by the seeker whether it’s in illumination mode or not. Illumination mode simply gives the highest quality fastest speed of updates and most range.
In other manuals, you will find the same passage in differing versions. Some like the Russian manual are explicit “Turn towards target and attempt to regain lock.”
Some when they say “turn towards target in search mode and illuminate target” might more precisely mean “turn towards target and restart attack as normal to illuminate the target.”
Either way, if you are real pilot, you want to try to get lock back as soon as possible for most successful kill. If R-27R uses reflection from scan or sidelobe before you get successful lock that’s great.
So - this is "equivalent" for "flood mode". But not just flood - but rather radar tries to search? Right?
DNP lasts 60 seconds no matter what. As long as you can lock before terminal or impact the illumination won’t stop until the 60 seconds is over or the radar turned off.
I got this.Su-27 will turn off illumination as soon as lock breaks becuase with so many more missiles it needs to make room for datalink channels of missiles fired next.
Edit:
I got all.
From other manual, Yugoslavian one - this can be translated as:

"
UPOZORENJE!
PRI GUBITKU AUTOMATSKOG PRAĆENJA POSLE LANSIRANJA RAKETA R-27R
NA MALIM DALJINAMA ENERGIČNO ZAOKRENUTI NA CILJ RADI OBEZBEDJEN-
JA OZRAČAVANJA U REŽIMU OSMATRANJA. IZLAZAK IZ NAPADA VRŠITI POSLE
UNIŠTENJA CILJA."
"WARNING!IF AUTOMATIC TRACKING IS LOST AFTER LAUNCHING THE R-27R MISSILESAT SHORT DISTANCES, TURN ENERGETICALLY ONTO THE TARGET TO PROVIDE IRRADIATION IN THE OBSERVATION MODE. EXIT FROM THE ATTACK SHOULD BE PERFORMED AFTER DESTROYING THE TARGET."
I feel we are close to solve that topic. It is somehow more prosaic.
Just sum up.
In every manuals - there is as we know.
Just single target track, lock, preparation for missile guidance. Launch of missile.
Now we see that, if lock is broken, radar automatically goes to search mode, but illumination is preserved, just to finish guidance.
Missile already has programmed position of target with INS, and continue its flight. There is still a chance - it hit target.
There is high chance of hitting target using this search mode (let say "flood mode" but of course differently accomplished).
Especially at short distances.
And this is just "ordinary scan mode". I do not think updates (target positon corrections to missile) are provided, as target is not tracked.
Maybe after re-lock.
(Here some speculations: What do you think? Maybe as SNP is restored, the main target is "re-found" - here just in low resolution ,maybe updates are still possible?)
And maybe - it is option just to break lock "manually" and go to scan mode, something used in practice by pilots?
So this may be more practice than some (default) mode.
But well, you decrease chances to hit target - so maybe this is not what you want, intentionally ?
This is not the main way of working, rather "emergency one".
For short distance (this is even said in manual)- ok, this can even work.
But for longer shot - relaying on just illumination from SNP (DNP) - well..
This would explain sequence provided by Squirrel: SNP - RNP (lock) - launch - and then , (intentionally? or not?)- loose your track, go SNP (with illumination - you can call this DNP if you want).
Still this explains what Squirrel wanted to say : to keep target in "box".
So probably this can explain all confusion.
Still not 100% can explain statement - from technician. Or this German "student manual".
So maybe this is an option, but - you know.
Anyway - this is not the main way how missile should work.
What do you think?
Last edited:
Шурави1983
ACCESS: Confidential
- Joined
- 12 May 2025
- Messages
- 59
- Reaction score
- 58
What? Sorry I failed to understand...Do you think computer processing is reason that certain issues exist such as, not being able to interface IFF with IRST so that it would show IFF either on IRST target or when radar is locked in COOP mode and IRST mode selected (MiG-23/25 allowed any IRST target to be interrogated)? Or such as radar illumination switch needing to be put in Dummy/EKV for IRST modes with COOP turned on and Radar only working with IRST in pursuit/close combat mode?
Anyway, 1. The IFF antennas are usually intergrated into main antenna. So yes, you need to 'dummy/slave' the radar, if you wanna do it with IRST.
2.There's certain limits on IFF, such as: A. No IFF is used in search mode, probably due to software reason. (While in TWS, feasible.) B. Only limited amounts of targets (on mig-29 - 3) can be IFF-ed and displayed, due to range-gate and interface/ports on SEI/interface/display.
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
But they aren’t integrated with the main antenna but separate.What? Sorry I failed to understand...
Anyway, 1. The IFF antennas are usually intergrated into main antenna. So yes, you need to 'dummy/slave' the radar, if you wanna do it with IRST.
2.There's certain limits on IFF, such as: A. No IFF is used in search mode, probably due to software reason. (While in TWS, feasible.) B. Only limited amounts of targets (on mig-29 - 3) can be IFF-ed and displayed, due to range-gate and interface/ports on SEI/interface/display.
When you enter IRST COOP mode, it does not IFF even with locked radar. This is something MiG-23/25 could do with IRST locked target just doing an interrogation pulse.
It will not work with IRST unless the SUV selector is in Radar mode. Which the manual warns you about in the chapter on COOP/interaction where it says IFF does not work with any COOP/interaction mode while the selector is in TP/B.boy/OPT/HMS.
In addition to only pursuit/close combat working with IRST (head on cannot, but does on Su-27), or even needing the switch in dummy which is an odd requirement when we already have this COOP switch.
I’m aware that IFF can’t discriminate azimuth
It has no flood antenna or secondary arrayAnd you may have second array - just ordinary "horn". This is flood antenna. It has wide beam. I do not know how much, but lets say 30deg, 45 deg or more. It is used in western desing like APG- 63 -65 --70 and so on. It is just auxiliary way for providing illumination. Not main. It is used just if target is in close ranges, visual one. For instant illumination and launch Aim-7 missiles, without locking target. This is also "normal" case but some other mode.
had the same impression, that illumination - is somehow not directed but kept somehow in axis of fighter (as flood or just other way) And pilot has to move towards target.
It is not. As I mentioned, this passage is about one of two things
1. It is almost 100% an incorrectly translated version of the exact same passage in the Russian manual, which says to “re engage and lock the target.” Turn towards target in search mode is basically asking pilot to re lock and attack as usual
2. It is telling the pilot to use the search mode to illuminate the target. This would be done by both the antenna passing over the target in its normal 4 bar/6 bar scan and/or from the sidelobes as described in other manuals as capable of guiding the R-27R
It is not locking the antenna or anything, no flood mode, no flood antenna, no secondary array
Manual literally says this. Did people not believe me first time?agree
But illumination of target from fighter? By sidelobes?
This is what Russian manual says!

Theoretically yes but no pilot would do this. Do you remember what I attached about the missile is designed to only handle a 30% of remaining TOF gap in illumination? Lock can take any where from 2-7 seconds. It is just not practicalAnd maybe - it is option just to break lock "manually" and go to scan mode, something used in practice by pilots?
So this may be more practice than some (default) mode.
But well, you decrease chances to hit target - so maybe this is not what you want, intentionally ?
I hardly think so. How will you ensure the missile sees the target and not other reflections? You can’t.This would explain sequence provided by Squirrel: SNP - RNP (lock) - launch - and then , (intentionally? or not?)- loose your track, go SNP (with illumination - you can call this DNP if you want).
Still this explains what Squirrel wanted to say : to keep target in "box".
So probably this can explain all confusion.
Either way. You will not find “turn to target in search mode” in Russian manual, only this “turn to target in search mode and hope that your sidelobes illuminate the target before you can re lock.”
I believe THIS is what the Yugoslavian manual passage is translated from, and translated incorrectly.,
Who would ever stay in search mode when they have opportunity to lock target and narrow illumination to constantly light them up? No one.
Attachments

LukaszK
I really should change my personal text
- Joined
- 15 January 2018
- Messages
- 132
- Reaction score
- 180
I am not talking here about N-019, it just general case.It has no flood antenna or secondary array
Sure. Thank you. So in this emergency state (it is not something normally you want? break lock) - if there is no lock - still some guidance can be provided by side-lobes, at least untill stable lock is regained.It is not. As I mentioned, this passage is about one of two things
1. It is almost 100% an incorrectly translated version of the exact same passage in the Russian manual, which says to “re engage and lock the target.” Turn towards target in search mode is basically asking pilot to re lock and attack as usual
2. It is telling the pilot to use the search mode to illuminate the target. This would be done by both the antenna passing over the target in its normal 4 bar/6 bar scan and/or from the sidelobes as described in other manuals as capable of guiding the R-27R
It is not locking the antenna or anything, no flood mode, no flood antenna, no secondary array
Manual literally says this. Did people not believe me first time?
This is what Russian manual says!
View attachment 803366
Theoretically yes but no pilot would do this. Do you remember what I attached about the missile is designed to only handle a 30% of remaining TOF gap in illumination? Lock can take any where from 2-7 seconds. It is just not practical
I hardly think so. How will you ensure the missile sees the target and not other reflections? You can’t.
I would ask you the same question for missiles in flood mode in western designs.
But more seriously -antenna scan angular area where target should be. That is first. Second, use filter to filter Doppler frequencies - according to estimated closure/opening speed. All ground reflections will have speed "around zero". Target positive or negative.
Let assume close some close combat (let say below 10km), there is lock and illumination. And radar breakes lock. Missile have some estimated parameters of target position , trajectory and closure speed. If there is short brake in illumination - target path is still extrapolated. If illumination is returned (even from surveillance), by sidelobes - still missile can hit target.
That's all.
okEither way. You will not find “turn to target in search mode” in Russian manual, only this “turn to target in search mode and hope that your sidelobes illuminate the target before you can re lock.”
It is translated correctly. But miss "relock". Also german manual in this points says about: "to ensure illumination of the target in oversight mode"I believe THIS is what the Yugoslavian manual passage is translated from, and translated incorrectly.,
Maybe.Who would ever stay in search mode when they have opportunity to lock target and narrow illumination to constantly light them up? No one.
Is there something to add in this topic?
If not - pls EOT.
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
In western designs there are two things to mention, that yes going for the wrong target was a strong possibility, and two that some of this was filtered out by telling the missile to look for a certain velocity range.I would ask you the same question for missiles in flood mode in western designs.
This is likely one of the reasons for the passage of “the missile can only handle a 20-30% break in illumination timing compared to remaining TOF” becuase the missile perhaps is looking for the velocity of the target when it was lost within a large enough range to cover how much speed may have changed Since the last time it saw the target. I wouldn’t throw a flood mode missile into a furball of friendlies
Also should mention, radar will be in memory mode for 5-8 seconds after losing lock. By the time the radar screen changes to search mode, lock was already lost 5-8 seconds ago (and the radar trying to re lock for those 5-8 seconds and failing).
Шурави1983
ACCESS: Confidential
- Joined
- 12 May 2025
- Messages
- 59
- Reaction score
- 58
No no, it does. The separated 'parts' you see as SRO-2 is not for fighter jets, but the one 'be interrogated', like civilian targets, etc, not 'interrogator'.But they aren’t integrated with the main antenna but separate.
When you enter IRST COOP mode, it does not IFF even with locked radar. This is something MiG-23/25 could do with IRST locked target just doing an interrogation pulse.
It will not work with IRST unless the SUV selector is in Radar mode. Which the manual warns you about in the chapter on COOP/interaction where it says IFF does not work with any COOP/interaction mode while the selector is in TP/B.boy/OPT/HMS.
In addition to only pursuit/close combat working with IRST (head on cannot, but does on Su-27), or even needing the switch in dummy which is an odd requirement when we already have this COOP switch.
In Pic.1 and Pic.2 is the condition of Mig-29B. The IFF is actually parallel with the searching of fire-control radar.
I made a mistake(Pic.3 ), radar do IFF when searching. No IFF for IRST search. And if you turned RNP, IFF.
These weird 'stick-like leaves' make up the IFF antenna, the example taken is N011 (planar slot array version). You can found it on Н007, usual western planar slot array antennas, etc. The twisted-cassegrain antennas like N019, N001, S-23 are sealed, so you might not find them, even in dismantled 'sections' of them, but I believe they do exist somewhere.
Attachments

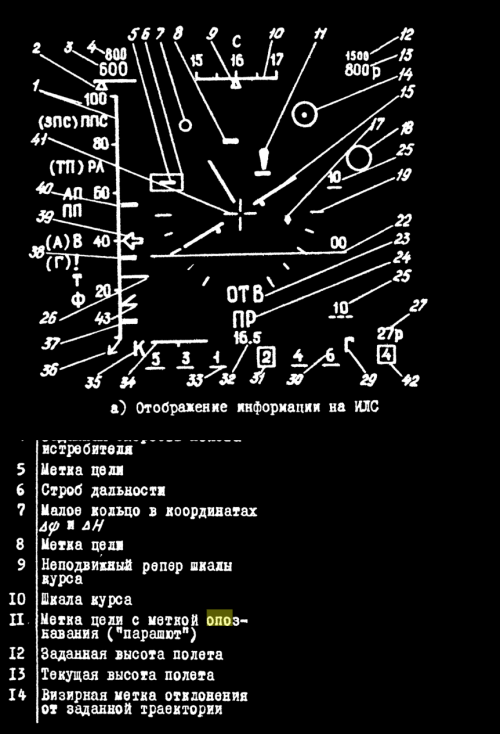
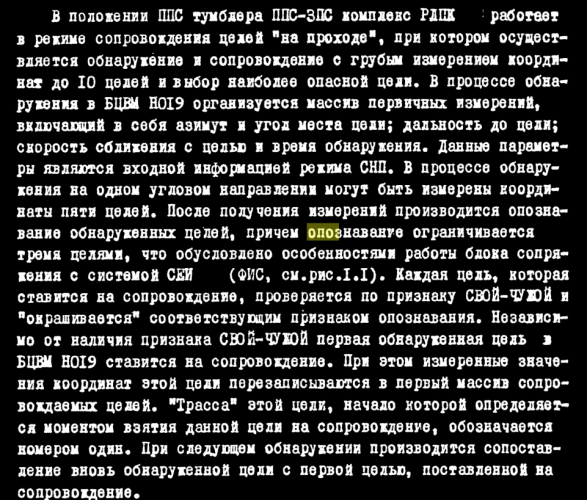
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
The IFF interrogator I believe is the 3 odds to the left of the IRST, and/or the orange triangle under the nose. Both are part of SRO-2.No no, it does. The separated 'parts' you see as SRO-2 is not for fighter jets, but the one 'be interrogated', like civilian targets, etc, not 'interrogator'.
In Pic.1 and Pic.2 is the condition of Mig-29B. The IFF is actually parallel with the searching of fire-control radar.
I made a mistake(Pic.3 ), radar do IFF when searching. No IFF for IRST search. And if you turned RNP, IFF.
These weird 'stick-like leaves' make up the IFF antenna, the example taken is N011 (planar slot array version). You can found it on Н007, usual western planar slot array antennas, etc. The twisted-cassegrain antennas like N019, N001, S-23 are sealed, so you might not find them, even in dismantled 'sections' of them, but I believe they do exist somewhere.
The radar dish is flat, there are no IFF interrogation connected to it
It’s not IRST search I necessarily talk about, but turn on TP and dummy and COOP. Lock someone. Then press lock again to lock radar STT, you will still have no IFF despite radar lock. It is an odd limitation
It can IFF in Lazur/Beryuza datalink mode with radar in dummy being turned on remotely, only difference is selector is in Radar (RL) mode.
Attachments

Last edited:
Шурави1983
ACCESS: Confidential
- Joined
- 12 May 2025
- Messages
- 59
- Reaction score
- 58
Um, the piece taken from Su-27SK manual said that if you IRST the target, 'dummy/slave' the radar to RNP/STT mode, then you can do the IFF now?我认为敌我识别询问器是红外搜索跟踪系统(IRST)左侧的三个方格,或者机头下方的橙色三角形。它们都属于SRO-2系统。
雷达天线是平的,没有连接敌我识别询问装置。
我说的不一定是IRST搜索,而是开启TP、dummy和COOP模式。锁定目标后,再次按下锁定键锁定雷达STT,即使雷达已锁定,你仍然无法识别敌我识别目标。这是一个奇怪的限制。
在 Lazur/Beryuza 数据链模式下,当雷达处于虚拟状态并远程开启时,它可以进行敌我识别,唯一的区别是选择器处于雷达(RL)模式。
Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
Which piece?Um, the piece taken from Su-27SK manual said that if you IRST the target, 'dummy/slave' the radar to RNP/STT mode, then you can do the IFF now?
Regardless, if it does, that’s a great improvement for Su-27. However N-019 is different. It has more limitations. Slightly higher notch speeds. Higher angle before notch is removed. Head on mode cannot work with IRST (unless gun is selected).
For some reason it is as off the IFF is directly wired to the “RL” position of the SUV knob and unavailable with IRST and COOP/interaction and radar locked, even if IRST loses lock and radar is shown on HUD with TP/B.boy/OPT/HMS selected (and within 10 km for B.boy/OPT/HMS modes).
Placement of IFF equipment on MiG-29, it’s not on the radar. Both The rods next to IRST and triangle below do interrogation.
 .
.Attachments
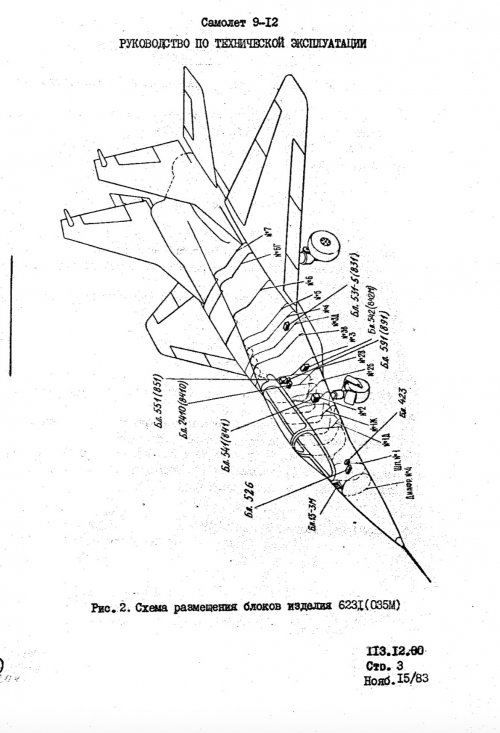
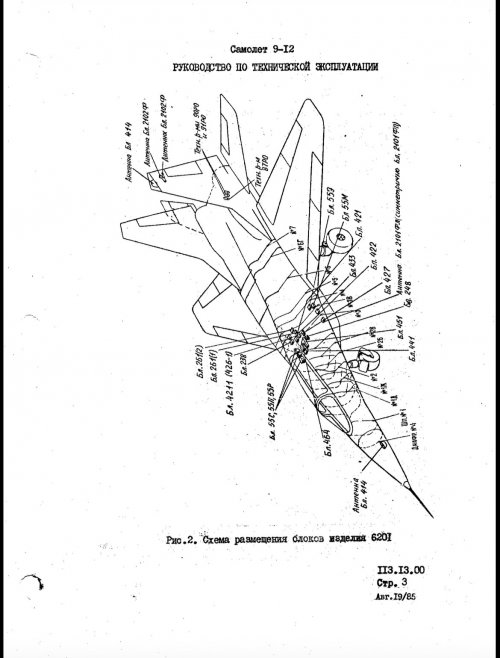
Last edited:

Aeria Gloria
ACCESS: Secret
- Joined
- 8 February 2024
- Messages
- 372
- Reaction score
- 431
This is the compensation horn, it receives ground signals and inverts it to feedback and reduce clutter and ground interference. Your compensation switch or APK effectively makes this much more powerful
Any yellow tubing you see is connected to it or for other horn.
Because it is attached to roll gimbal this means that ground clutter can’t be countered so well at roll angles over 120 degrees when roll gimbal of radar runs out of room.
Newer and western designs fixed this issue by having compensation horn attached to main antenna
Similar threads
-
-
 Phazotron Sapfir-23 and Sapfir-25 radar
Phazotron Sapfir-23 and Sapfir-25 radar- Started by overscan (PaulMM)
- Replies: 198
-
-
McDonnell-Douglas F-15 Avionics, AN/APG-63/70 radar
- Started by overscan (PaulMM)
- Replies: 112
-
 MiG-21LanceR A , B and C Avionics ...systems etc
MiG-21LanceR A , B and C Avionics ...systems etc- Started by AFlyer216
- Replies: 2