"Tech Transfer Hobbles South Korea's Fighter Program"
By Jung Sung-ki 2 p.m. EDT September 27, 2015
Source:
http://www.defensenews.com/story/defense/air-space/strike/2015/09/27/tech-transfer-hobbles-south-koreas-fighter-program/72808800/
By Jung Sung-ki 2 p.m. EDT September 27, 2015
Source:
http://www.defensenews.com/story/defense/air-space/strike/2015/09/27/tech-transfer-hobbles-south-koreas-fighter-program/72808800/
SEOUL, South Korea — Only six months after Seoul’s KF-X fighter program took off, the state project valued at about US $15 billion faces a crash over tech transfer issues with the US government.
The KF-X is linked to Lockheed Martin’s sale of 40 F-35As to South Korea under the F-X III program through the Foreign Military sales process. Lockheed Martin offered to provide 21 technologies required to build the KF-X fighter jet as part of F-X III offset deals. The US aircraft giant was also selected as the main partner to build KF-X with Korea Aerospace Industries.
At the request of Seoul’s Defense Acquisition Program Administration (DAPA), Lockheed Martin also agreed to consult with the US government over the transfer of four more technologies related to the active electronically scanned radar (AESA), electro-optical targeting pod, infrared search-and-rescue systems, and radio frequency jammer.
In April, however, the DAPA received notice of the refusal to transfer the four technologies, according DAPA officials.
“We were trying to secure the US export license of those technologies but failed to get them,” Lt. Gen. Park Shin-kyu, head of DAPA’s procurement business bureau, said. “Instead, we’ll seek ways of obtaining those technologies from other countries or through local developments.”
The general hinted the KF-X timeline could be further delayed from 2025 without the US tech transfer.
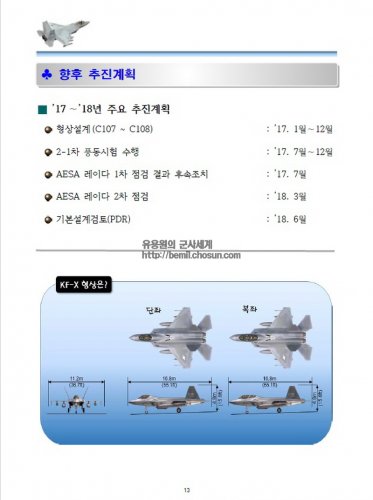
The AESA, in particular, is a key specification of the KF-X, which is expected to be a twin-engine F-16-plus fighter jet with high-end sensor systems. Some 120 jets are to be built to replace the aging fleet of F-4s and F-5s.
Lockheed Martin says it is still consulting with the US government over transfer of the technologies.
“There is no F-35 customer nation receiving the AESA radar technology,” a Lockheed official said. “We made it clear that the tech transfer is only possible with the approval of the US government. We tried but failed.”
Cheong Wa Dae (executive office), however, said DAPA was trying to cover up the tech transfer failure.
The presidential office launched a probe into the suspicion that DAPA had selected Lockheed as the final bidder for both the F-X III and KF-X programs in an unfair manner.
“The presidential office will look into all paperwork and documents related to the KF-X program,” a Cheong Wa Dae spokesman said, adding that the fighter development plan could be halted if it is judged nonviable economically and technically.
Some pundits anticipate the KF-X fiasco could affect the F-X III contract in a worst-case scenario.
“I think it’s not possible that the South Korean government cancels the F-X III contract with Lockheed Martin at this moment,” Kim Dae-young, secretary-general of the Korea Defense & Security Forum, a Seoul-based defense think-tank, said. “But the controversy over the F-X III competition process could become an issue again.”
In 2013, Lockheed Martin was dropped in the middle of the F-X III competition, but the DAPA reversed its decision later, upsetting then-preferred bidder Boeing.
The DAPA argued the country’s Air Force needs to operate fighters fitted with the so-called fifth-generation radar-evading capability in response to North Korea’s threats. As a result, Lockheed Martin won the $7 billion deal, beating Boeing and Eurofighter though the latter promised to provide more lenient tech transfers than did the former.
“The easiest way is to buy US radar and sensors to fit them into the KF-X jet, but that may provoke a backlash,” Kim said, referring to the alleged trauma of the T-50 development.
Lockheed Martin helped South Korea develop the T-50 Golden Eagle supersonic trainer jet. But key technologies are protected by the US, so integrating European radars into the plane or exporting the jet to other countries requires US approval.
“This case should serve as an opportunity for us to look back on the way we treat the US,” said Rep. Kim Jung-hoon of the ruling Saenuri Party. “We decided to buy fifth-generation fighter jets with the expectation of sophisticated tech transfer, but now we have nothing.”


")