Morris OFW Flight Testing
During the above studies, NASA Ames funded Steve
Morris at Stanford University to build and fly two smallscale
OFW aircraft; these were the first powered oblique
flying wing flight demonstrations. NASA’s grant allowed
Morris to develop these demonstrators in order to study
handling qualities, investigate control algorithms for stability
augmentation, and demonstrate the feasibility of the
inherently unstable configuration and its applicability to the
full-scale OAW transport discussed above (specifically to
emulate the 1991 design depicted in Figure 43). In support of
the F-8 OWRA program, Morris had previously analyzed the
lateral accelerations of the AD-1 simulation results and found
a way to simultaneously optimize the aerodynamic
configuration and the handling qualities of oblique wing
aircraft. Morris research in support of his thesis addressed
issues discovered during the OWRA program including
aeroelastics, stability and control, and aerodynamic issues of
oblique wing aircraft.75
The first model (Figure 48) was a 10 ft span radio
controlled aircraft powered by a single propeller, capable of
pivoting to effect the vehicle sweep angle between 25° and
65°. Aircraft characteristics are given in Table 14. The
model was statically stable in pitch and had no flight
computer for stability augmentation, being manually
controlled using radio control.*
For control, the aircraft used three trailing edge surfaces
and a single all-moving vertical fin. It crashed on its first
flight due to pitch effects of the single large vertical tail: the
aerodynamic load centroid of the fin was too far
above the plane of the wing, producing a significant
pitching moment that overpowered the pitch
authority of the flaps. A vortex lattice code was
used to model this and to explore ways of correcting
this phenomenon. Morris’ studies showed that if the
fin was canted, the aerodynamic force vector from
the fin could go through the pitch axis, decoupling
the force. Many vertical tail configurations were
tested with a final result of using two smaller fins.
The model was flown extensively over a 6 month
period, as shown in Figure 49, eventually flying up
to sweep angles of 65° briefly to verify that there
was adequate control authority to trim the aircraft at
this flight condition. During several of the flights,
Morris attached long streamers to the trailing edge
to see the sweep angle in flight. 75-77, *
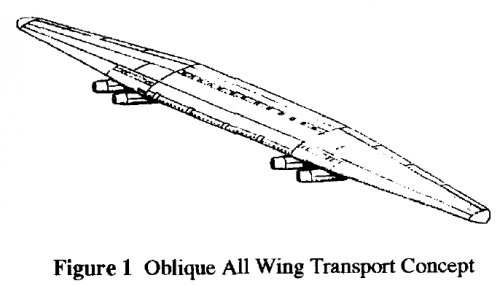
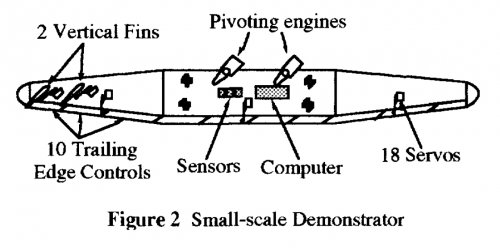
The second aircraft had a 20 ft (unswept) span
and used 10 trailing edge control surfaces, as well
as two all-moving vertical fins. The aircraft was sized to be a 5%-scale model of the full-scale 400 passenger OAW
(Figure 43). Trailing edge surfaces were sized to be 25% of the local wing chord in order to produce the most
control authority within a reasonable size. The vertical fins were sized for sufficient control authority in the event of
an engine failure, but the centroid of the loading was kept close to the surface of the wing in order to avoid pitch
coupling.
The second aircraft weighed 80 lb and was powered by two radio control model aircraft 5 hp single cylinder
engines driving ducted fans that produced 12.3 lb of thrust at 23,000 rpm; the fans could pivot to effect the variable
sweep in flight from 35° to 68°. The 48 oz of fuel was sufficient for about 6 minutes of flight time. The landing gear
was a fixed, quadracycle gear arrangement with four wheel steering to allow the aircraft to taxi. The model used
three flight sensors: a 3-axis rate gyro, an angle of attack, and angle of sideslip vane, and a wind turbine air speed
indicator. Figure 50 shows a general comparison of the two aircraft.
The airframe was constructed of an aluminum spar with steel sub-spars to support the landing gear, engines and
fins. Wing ribs covered by Kevlar and foam molded skin formed the aircraft surface. The leading edges were formed
from balsa and fiberglass; the entire trailing edge was comprised of the balsa control surfaces, which were sized by
the maximum torque that the servos could produce.
Prior to flight, the model was evaluated in a
captured “flight” affixed on a universal three-degree of
freedom pivot on top of an automobile. The vehicle
was driven at the full range of flight speeds, exposing
the aircraft to a realistic environment with
aerodynamic forces and moments approximately
equivalent to those in flight. This testing was used to
verify the desired function of the stability
augmentation system, control surface authority, and
trim settings prior to first flight. Ten series of tests
were conducted at Moffett Field/Ames Research
Center, providing a thorough investigation of the
aircraft’s aerodynamic behavior and its stability
augmentation system with a variety of control gain
settings.
The model was 1.5-1.7% statically unstable in
pitch. Initially, it was intended to be 7% unstable (to
match the proposed operational vehicle), but during
the vehicle testing, the off-the-shelf servos were
determined to be too slow to control the vehicle
adequately. In addition, vehicle testing also
showed that the ducted fans created a pitching
moment, because their thrust line passed below
the aircraft center of gravity. It had been hoped
that the resulting induced flow over the control
surfaces would increase their effectiveness
sufficiently that a small flap deflection would
correct this moment. Vehicle tests, however,
showed that at full power, the thrust-dependent
pitching moment was too great to be trimmed by
a flap deflection. As a result, deflecting vanes
were placed in the fan efflux, reorienting their
thrust through the center of gravity. Once these
were installed, the vehicle tests proved that there
was no change in pitch trim with throttle changes.
The final series of vehicle-mounted “flights”
were conducted to verify the stability and trim
settings. The controls were set so that the aircraft
would have no rolling moment at the lift-off
conditions of 10° angle of attack and 35° sweep,
in order to minimize the danger of losing the
aircraft during take-off.
The 20 ft model performed a single flight in
May 1994 at Moffett Field, adjacent to NASA
Ames (Figures 51 and 52). During a 23 second
take-off roll, the aircraft accelerated to 45 mph
and then rotated for lift off. It flew to an altitude
of 150 ft and made a left hand turn around the
airfield. The model was flown at speeds from 25
to 65 mph (at 35° sweep). During the second
circuit, the wing sweep was momentarily
increased to 50°. At the end of this pass, the
model was landed to ensure it didn’t run out of
fuel. Total flight time for this flight was only 4
minutes. Budget constraints precluded additional
flight testing.
NASA had hoped to follow the supersonic
wind tunnel tests and Morris’ small OFW tests
with a 1/10th-scale supersonic unmanned
demonstrator, but sufficient interest and funding
did not materialize.













")