T. A. Gardner
ACCESS: Top Secret
- Joined
- 18 February 2021
- Messages
- 882
- Reaction score
- 1,516
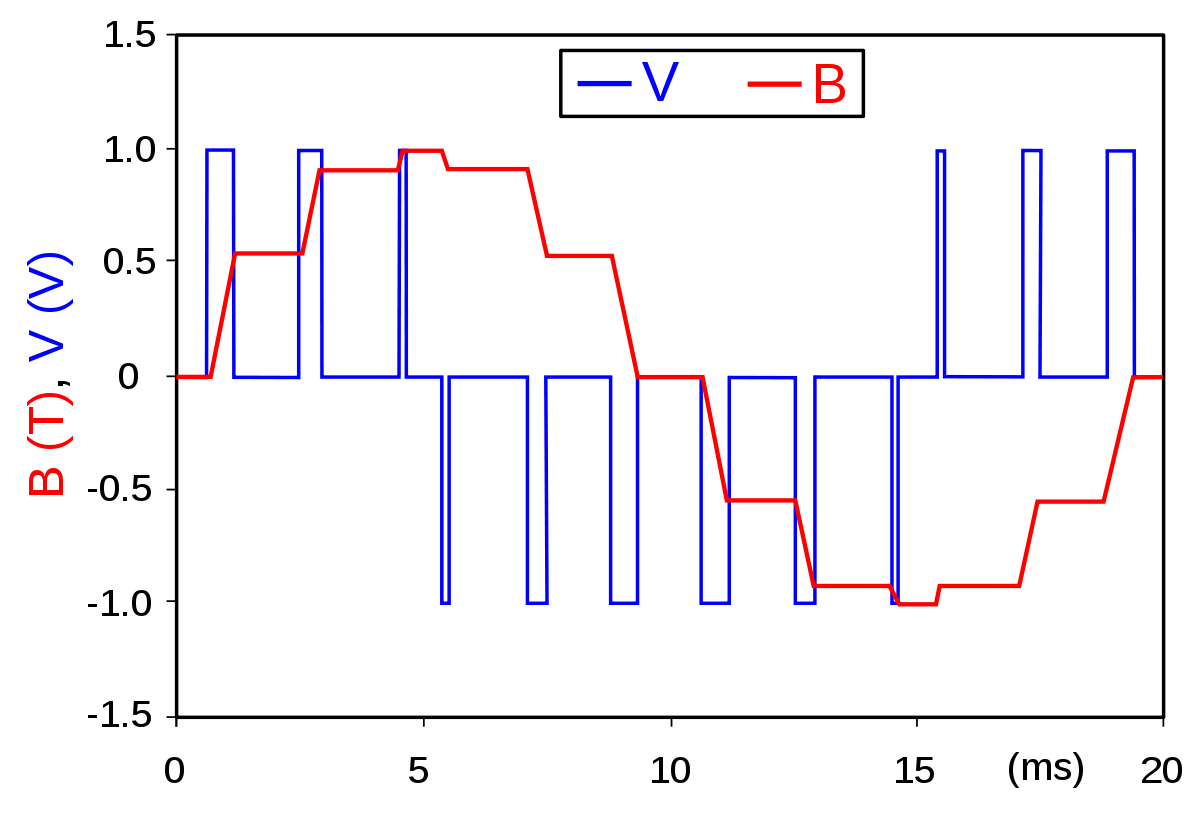
Actually, the Artemis was about as simple as you could get. The seeker head rotated while the rocket projectile was unrotated. It used a very simple receiver circuit that ran through a Wheatstone bridge-like circuit that determined the seeker position relative to the reflected signal of the radar painting the target. This worked similarly to a conical scan radar signal being received. This completed a signal that caused a solenoid to pop the spoiler up when the direction of the signal matched the direction of the spoiler.
When the seeker was on target, you got a zero reference that resulted in no output.
The problem with this system is that it's very crude in terms of input and output. The whole idea behind it was to used the missile only in a tail chase and it would be fired pretty much directly at the target. The seeker device was simply to correct relatively minor deviations in course to keep it moving at the target. It was better than nothing, but not by much.
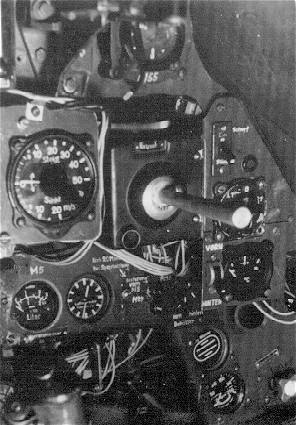
With the X-4, the guidance system was limited to a very simple one by the small size of the missile. That ruled out using active radar or even semi-active homing or beam riding. Those circuits required tubes and those took up a lot of space. You can get some idea of how much space such systems took at the time from that of the Bat glide bomb:

The homing radar is up front. On top of the wings is the guidance system. Behind that is the gyros and battery. Not a small system. Something similar was used in the US JB-3 Tiamat. That missile is several times larger and heavier than the X-4 because of the necessary room to fit all those electronics.
When the seeker was on target, you got a zero reference that resulted in no output.
The problem with this system is that it's very crude in terms of input and output. The whole idea behind it was to used the missile only in a tail chase and it would be fired pretty much directly at the target. The seeker device was simply to correct relatively minor deviations in course to keep it moving at the target. It was better than nothing, but not by much.
With the X-4, the guidance system was limited to a very simple one by the small size of the missile. That ruled out using active radar or even semi-active homing or beam riding. Those circuits required tubes and those took up a lot of space. You can get some idea of how much space such systems took at the time from that of the Bat glide bomb:
The homing radar is up front. On top of the wings is the guidance system. Behind that is the gyros and battery. Not a small system. Something similar was used in the US JB-3 Tiamat. That missile is several times larger and heavier than the X-4 because of the necessary room to fit all those electronics.