- Joined
- 27 December 2005
- Messages
- 16,414
- Reaction score
- 18,936
Thread to discuss MiG-23 Avionics

the doppler shift of the clutter (earth background) is taken as a reference (coherent) signal to process the doppler filtering. Therefore the filtering technique itself is called the SDTs- The moving target selection with external coherence.
3rd generation (1970 years) compose pulse BRLS, which ensure target detection, that fly against the background of the earth, with the attack by fighter from top to bottom. This problem for the first time was posed in our country, but the necessary scientific technical reserve was absent for its solution. The method of the selection of the moving purposes (SDTs) with the application of a external coherency of the signals reflected from the earth's surface and the moving purpose was selected as the basis of the solution. In the systems with the external coherency reference signal is created due to the reflexions of sounding pulses BRLS from the extensive local objects on the earth's surface. The signals from these objects reflected can n 3.… 80 dB exceed the level of internally-produced noise of receiver and mask useful signal.
To isolate target by the method SDTS is possible, when the signals reflected occupy one permitted pulse capacity and the radial velocity of purpose such, that the corresponding to it Doppler frequency not to the multiple frequency of the repetition of sounding pulses. The signal reflected from the target does not pulsate with the multiplicity of such frequencies and by hardware it is compensated as the coherent signal of a constant amplitude of reflections from the local objects on the earth's surface. The indistinguishability of purpose contribute also the instability of the work of equipment and the external reasons, connected with the fluctuation of amplitude and phase of the signal reflected.
For the realisation of this resolution OF NII RTNII - SCIENTIFIC RESEARCH INSTITUTE radio construction was preset the development BRLS “Sapfir-23” for the aircraft MiG-23 (chief designer Kunyavsky g. M.). After connexion to these work OF NII RTNII - SCIENTIFIC RESEARCH INSTITUTE instrument manufacture and creation in 1969 OF NPO “Phazotron” the chief designer OF BRLS “Sapfir-23” becomes Figurovsky Yu. n.
Fundamental difficulties in the creation of mode SDTS arose during the guaranty of the necessary level of noise of the transmitting device and dynamic range of receiving device. The first led to the appearance of the large number of false target blips, and the second coarsened sensitivity BRLS, that it did not make it possible to isolate the weak signals of the purpose of the against the background powerful signals, reflected from the earth.
Solution of these problems required the concentrations of the efforts of the specialists of many scientific and production organisations. To the development of system “Sapfir-23” is assigned the group of the specialists OF NII RTNII - SCIENTIFIC RESEARCH INSTITUTE instrument manufacture headed by by the deputy design project leader of association Grishin v. k., which together with the specialists OF NII RTNII - SCIENTIFIC RESEARCH INSTITUTE radio construction conducts performance and tests of this system. According to the results of tests is finished a large quantity of units BRLS of the, including transmitting and receiving channels. In 1976 g. the aircraft MiG-23 with the system “Sapfir-23” was accepted for the armament.
BRLS 3rd generation with the mode SDTs are executed on the semiconductors and the micromodules, in practise without the application of electron tubes; in them is realised the illumination of purpose by continuous emission for Doppler radar GSN, ensuring defeat of targets, which fly at the low altitudes (lower than the fighter). Furthermore, they joined through the systems of aircraft with the ground-based guidance systems and ensured capture and target tracking according to the data of ground-based ASU. This - BRLS of the development BY NII RTNII - SCIENTIFIC RESEARCH INSTITUTE of radio construction of the type “Sapfir-23” for the aircraft MiG-23 different modifications and “Sapfir-25” for the aircraft MiG-25
Dilbert said:Really, that's interesting... also from mrdetonator? Was he a former pilot or engineer?
In still another approach, called noncoherent or clutter-referenced moving target indication, the equivalent of coherence is achieved by detecting the “beat” between the target echoes and the simultaneously-received ground return. But as explained in page
24 in Chapter 2, this technique has serious limitations.
There are two basic approaches to implementation of MTI systems: (a) coherent MTI and (b) noncoherent MTI. The first provides better performance, but the second is simpler, using clutter to perform the same function as does the reference signal in coherent MTI. This is termed clutter-referenced or externally coherent MTI.
Clutter referenced MTI is “a type of noncoherent MTI that uses clutter as a reference.” Usually it is an adaptive MTI in which the average velocity of clutter surrounding the target cell is used to control the center velocity of the rejection notch.
In the conventional noncoherent MTI system, targets in range cells containing no clutter are lost for want of a phase
reference. Various clutter gating procedures are used to enable a normal video channel in such cells, bypassing the canceler to avoid loss of targets. A alternative noncoherent MTI detector uses the hard-limited output of adjacent cells as the reference to a phase detector, such that moving targets are detected in the absence of clutter through the random phase of noise in the reference cells.
Advantages of noncoherent MTI are simplicity and its inherently adaptation to moving clutter. Disadvantages are reduced improvement factor and inability of most types to operate in the absence of clutter.

Dilbert said:Ok, at least I will personally continue to NOT call Sapfir-E a "coherent pulse-Doppler" radar, to keep from getting confused with N-019 capabilities.
To operate correctly the SDTs with external coherence technique needs to synchronize the target signal with the clutter phase. To simplify this task, the clutter signal received by the radar sidelobes in the second/third scan cycle is used to process the doppler filter.
overscan said:"quazicontinuous" is best understood as "interrupted continuous wave".
I've never quite understood the difference between high prf pulse doppler with fm ranging and frequency modulated interrupted continuous wave. Aren't they basically the same thing?
overscan said:To operate correctly the SDTs with external coherence technique needs to synchronize the target signal with the clutter phase. To simplify this task, the clutter signal received by the radar sidelobes in the second/third scan cycle is used to process the doppler filter.
I think that the use of sidelobe clutter return means that, at low levels, the problem outlined above in the quotes (targets can only be detected in the presence of clutter) should not be an issue, as the sidelobes should always be generating some ground clutter.
Thus Lincoln Laboratory researchers attempted to make signals passing through the MTI canceler coherent by locking a coherent local oscillator (or COHO) to the phase of the return from a single range-gate sample of clutter. The COHO then ran at its own frequency until reset in phase by the clutter sample following the next transmission. This technique did not work well because of the finite width of the main-beam clutter spectrum. The COHO locked onto a spread of Doppler frequencies and produced ugly radial streaks on the PPI. A solution for the streaking problem was found by deriving the COHO phase from the average phase of a large number of clutter range elements. This technique, which became known as Time-Averaged Clutter-Coherent Airborne Radar (TACCAR), was conceived by one of the authors, Melvin Labitt
Dilbert said:From my perspective, it seems there was a Soviet theft or convenient re-definition of the words "coherent pulse-Doppler look-down/shoot-down" to describe "whatever radar technology we have right now" in 1970s (perhaps to claim parity with the West in some kind of negotiations?), that required them to invent a new label for what the west calls "coherent pulse-Doppler" when they finally invented that, in the 1980s, with N-019. So, maybe this is where that strange Russian word "quazicontinuous" came from, that didn't appear in any English-language radar texts: Russian definition of "quazicontinuous" equals western definition of "coherent"?
mrdetonator said:The meaning of the word "coherence" is the same for both the east(russian) and west world, but in case of the Sapfir radar, the difference is here merely how/where the coherence is achieved.
Coherence
By coherence is meant a consistency, or continuity, in the phase of a signal from one pulse to the next.
COHERENCE is the concept generally applied to harmonic oscillations:
u(t) = V0 sin(wt + y)
Two or more harmonic oscillations are termed coherent at the interval Tc if the phase shift between them is constant for the whole interval Tc. In radar, coherence is considered in a broader sense, and typically the signals are considered to be coherent if their phase structure is linked and the character of this linkage is known.
overscan said:Given that the "MV" mode has a fixed, known scan pattern, the average phase of the ground clutter return will vary with the speed of the host aircraft.
In radar, coherence is considered in a broader sense, and typically the signals are considered to be coherent if their phase structure is linked and the character of this linkage is known.
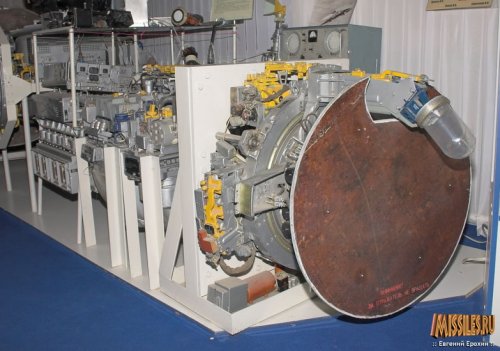
The picture doesn`t show the Sapfir-23MLx either. According to manuals both radars the 323E and the N-003 share the same design where the trasmitter/receiver waveguide is placed in the middle of the antenna.overscan said:Yes, you are correct.
Phazotron museum labelling sucks, apparently.
crossiathh said:BTW, the yellow wave guide on top is part of the, so called, "compensation channel"... Normally extend above the fixed part of the radar antenna, except the Sapfir-23DIII and Sapfir-23E. There it is directed to the moveable part of the antenna.

the document is not describing the antenna in detail, that`s all.overscan said:I think on this occasion you were mistaken- that or the manual was wrong!

If on picture Sapfir-23 in the description it is written that it has the latent conic scanningThe Sapfir-23E uses the mono-pulse technique to track a single target.[