- Joined
- 27 December 2005
- Messages
- 16,454
- Reaction score
- 19,149

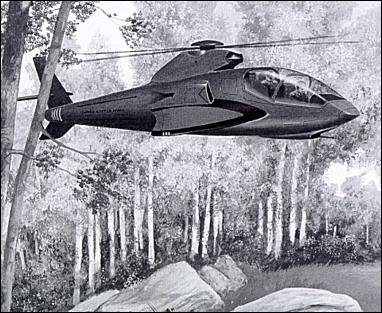
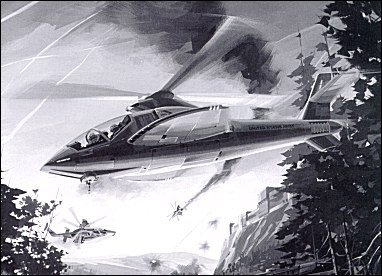
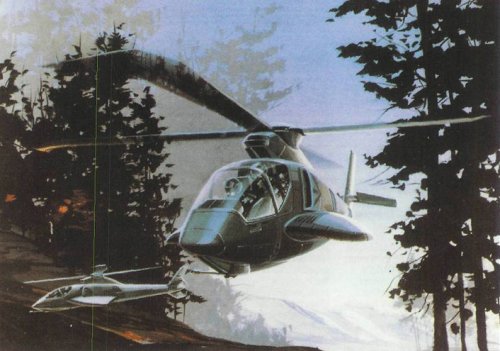
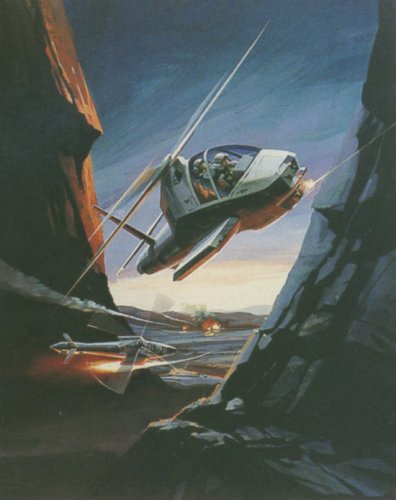
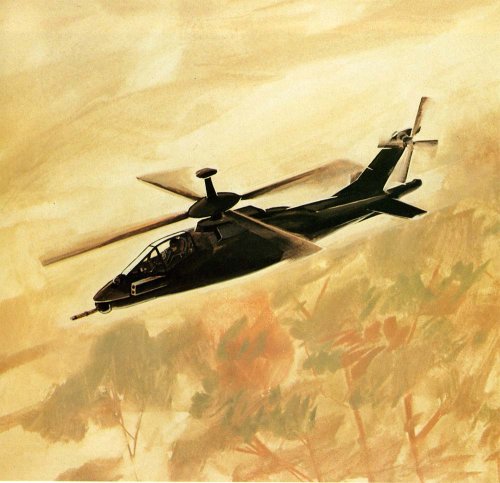
overscan said:More Bell/McDonnell team
")
I suppose the LHX was the forerunner of the comanche
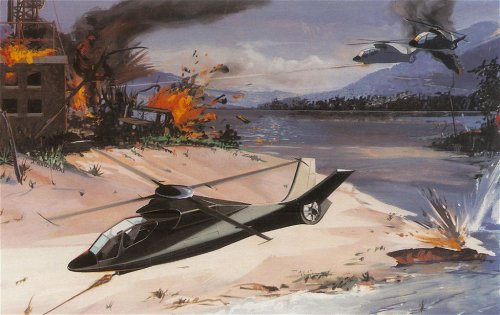
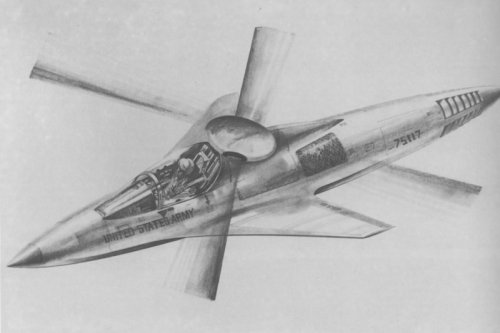
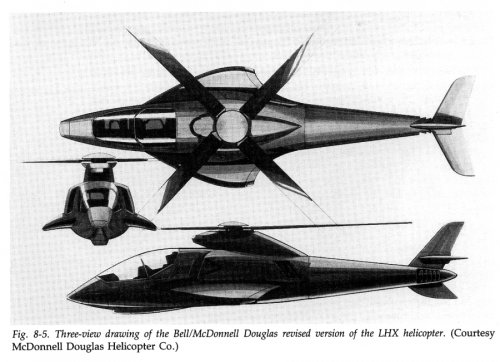
McDD project for NOTAR a supersonic jet helicopter/fighter.
overscan said:Some interesting info from USAF, 1985:
LHX/LOA requirements
- Highly agile, manouverable, single seat conventional rotorcraft
- Armament 4 Hellfire, 2 Stinger, 1 gun
- Self deployable 1250 nm
- 500fpm climb, 170kts (SCAT), 160kts (Utility) in hot & high conditions (4000ft, 95degF)
- Transportable in C-5, C-17, C-141
- Crashworthy design, wheel landing gear, NBC protection
- Twin T800 turboshafts
- 6 seats in utility version (space for eight)
- Integrated targeting system
- wide field-of-view optics
- 8000lb +-500lb target mission gross weight for SCAT
- Unit flyaway cost $6 million (SCAT), $4 million (Utility) in 1984 dollars
- 70% commonality between SCAT and utility versions
- 40-50% reduction in support and operating costs
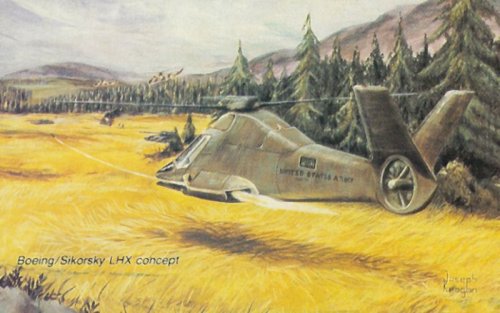
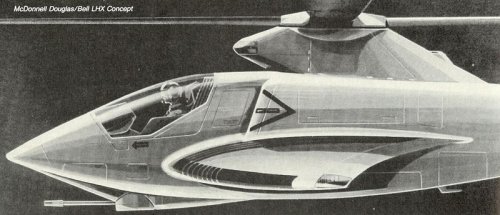
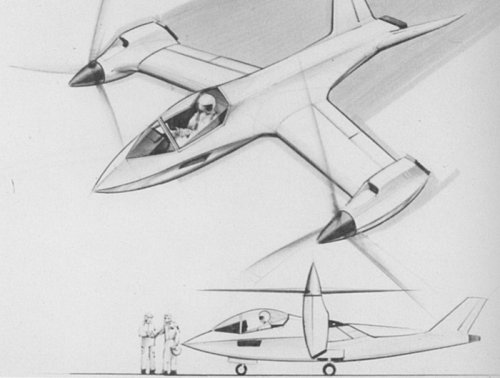
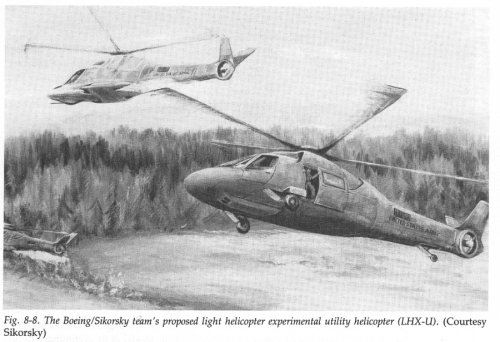
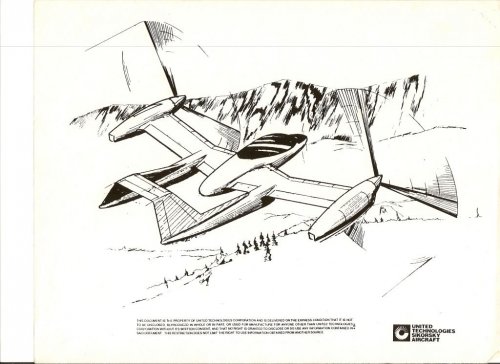
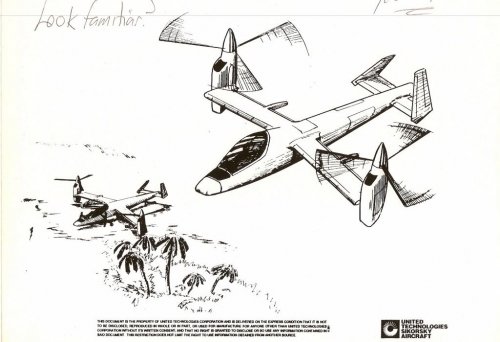
CammNut said:And while I am on (okay, slightly off) the subject - here are two Boeing folding-tiltrotor images (or maybe it was tilt-stop-foldrotor). This was actually intended to go supersonic, unlike McDonnell Douglas's cigar-shaped LHX (no propulsion system).
Firefly said:Interresting, but I doubt such a folding concept would be feasable, and if feasable, survivable on a modern battlefield.
yasotay said:Firefly said:Interresting, but I doubt such a folding concept would be feasable, and if feasable, survivable on a modern battlefield.
Actually the fold TR concept has been demonstrated with a scaled run in the NASA Langley Wind Tunnel about a decade ago. I would certainly be interested in why you think it not feasible today, although this is not the correct forum for it.
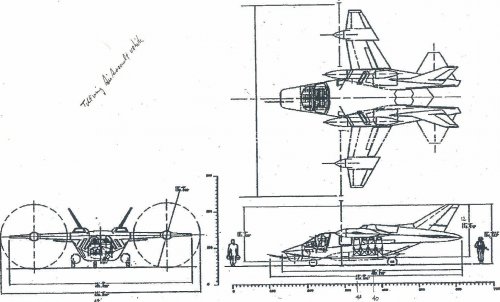
Cammnut I want to add my thanks for the great picks from Sikorsky on some of their TR work. Today it is taboo at Sikorsky to talk TR. They have also done a lot of work with tilt-wing work. Here is a stealthy tilt-wing from the mid-nineties that they worked on for the Army After Next efforts for the U.S.Army.
Firefly said:yasotay said:Firefly said:Interresting, but I doubt such a folding concept would be feasable, and if feasable, survivable on a modern battlefield.
Actually the fold TR concept has been demonstrated with a scaled run in the NASA Langley Wind Tunnel about a decade ago. I would certainly be interested in why you think it not feasible today, although this is not the correct forum for it.
Cammnut I want to add my thanks for the great picks from Sikorsky on some of their TR work. Today it is taboo at Sikorsky to talk TR. They have also done a lot of work with tilt-wing work. Here is a stealthy tilt-wing from the mid-nineties that they worked on for the Army After Next efforts for the U.S.Army.
First and foremost: I'm no engineer, just an avid enthousiast of the strange and little known.
I also have gut feelings about designs wether or not they are likely to work, especially in tactical situations.
The fold TR rotor seems like a very complex and costly ( in terms of development) design. It would take ages to get it right and makes the wingtips of the design overly complex and thus vulnerable. There's just too much to go wrong, and I doubt that the stellar performance of such a design in terms of speed at low altitude would protect it enough. By this I mean... Sheesh, just imagine one of the wingtips being damaged by a stray bullet.
So, to me, in this line of thinking, the design looks hardly feasable, and if feasable, flawed.
elmayerle said:Actually, this engineer considers a tilt-wing design preferable from a reliability viewpoint to a tilt-rotor design. Really, fewer moving parts, in relation to each other, and fewer critical joints. Wonder how a design combining the best of the V-22 and the XC-142 would look?