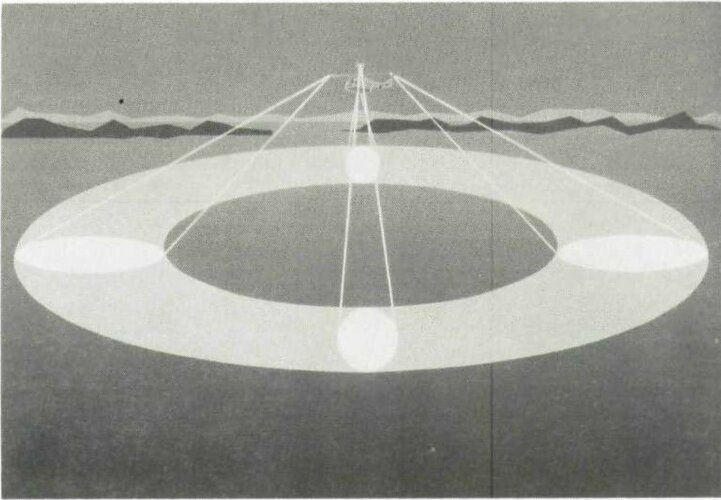
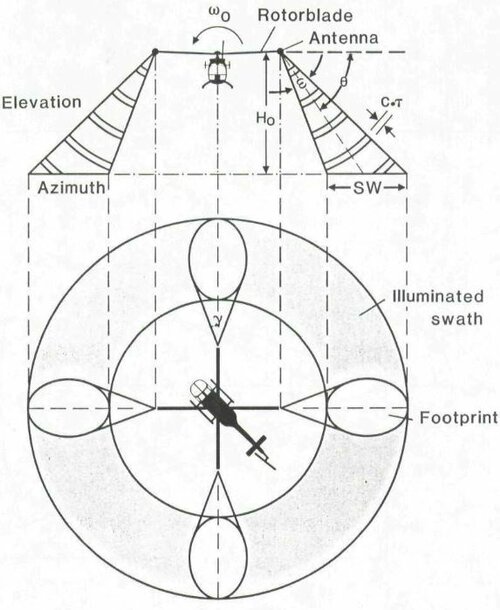
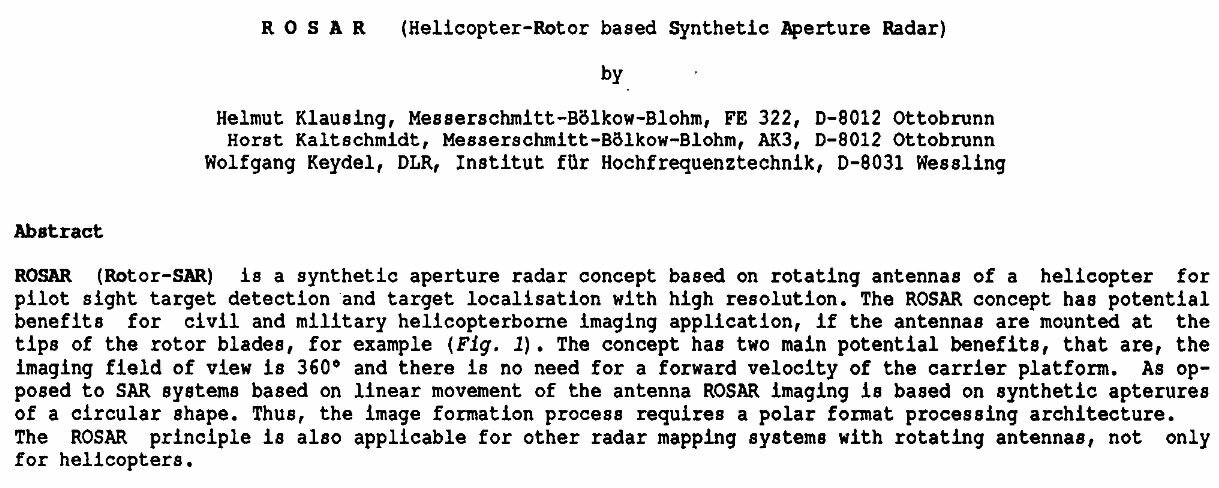
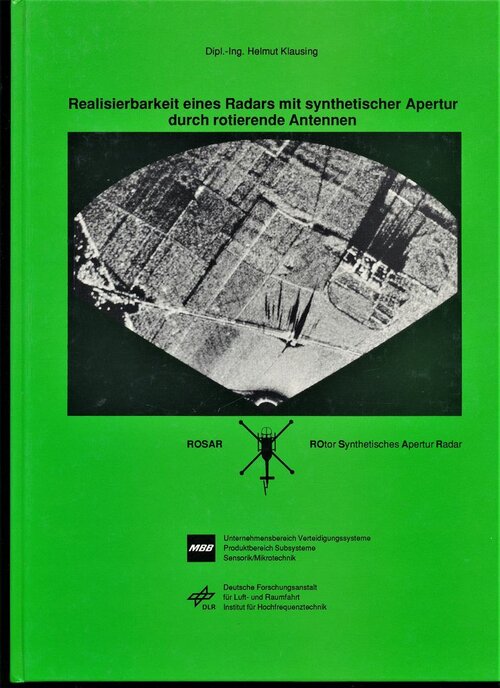
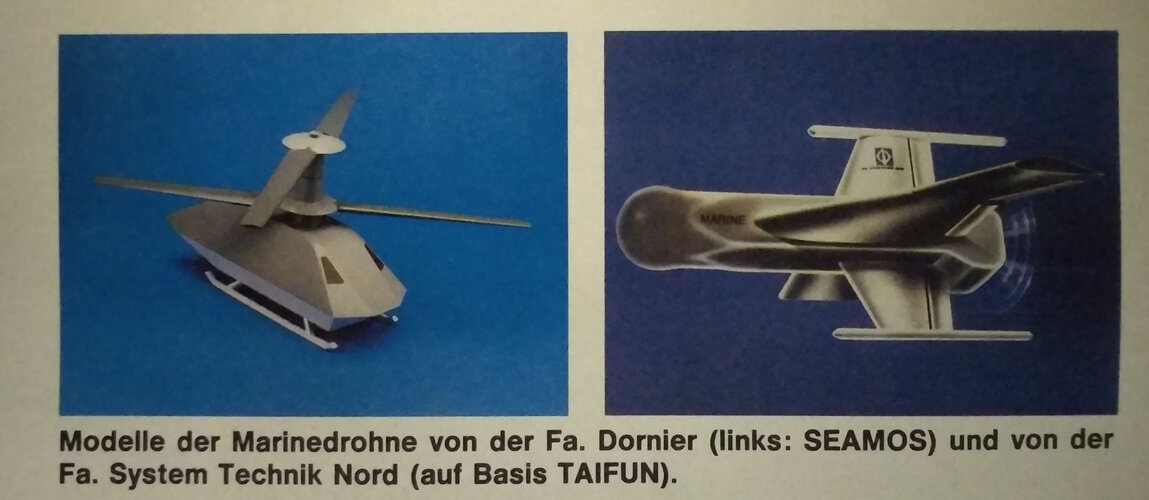
HeliRadar Technologies is launching development of a rotating synthetic aperture radar (ROSAR) for helicopters, which it claims will "revolutionise" the market by giving commercial operators a true all-weather capability.
The new company has been spun-off by DaimlerChrysler Aerospace (Dasa), which was due to become part of EADS on 10 July, and its 40%-owned helicopter subsidiary Eurocopter, to take over the German manufacturer's ROSAR patents and raise the estimated DM40 million ($20 million) needed to bring the product to market.
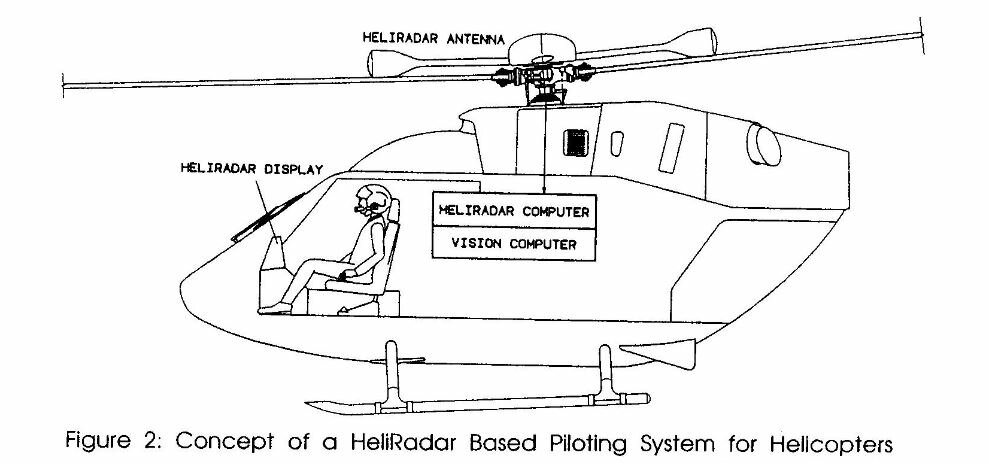
HeliRadar founder and managing director Hans Thilo Langer claims the rotor hub-mounted radar system is designed to provide the pilot with a synthetic image of the outside world, enabling operations under "nearly every meteorological condition". To detect obstacles and highlight them on a cockpit display, "intelligent" software algorithms will be used.
"We believe that, in future, we can fly in the same way as fixed-wing aircraft under instrument flight rules [IFR]/Cat III, but you have to develop it step by step," says Langer.
"We think we will ask for certification down to 300m [980ft] visibility, or perhaps 250m, to give everybody a chance to get confident with the system," he adds.
Langer says nearly one-third of the development funds has been raised, including a German Government pledge to provide DM12.5 million from the federal aerospace research budget. Langer owns 50% of HeliRadar, while Belgian digital signal processing specialist Eonic Systems has a one-third share.
Langer expects venture capitalists to invest in the project once a working demonstrator has been produced, while EADS and Eurocopter are expected to take small stakes. The company is considering an initial public offering.
Certification of the ROSAR is set for mid-2003 and list price is expected to be DM550,000-750,000. Langer says Eurocopter has committed to become the launch customer, although he also hopes that competing manufacturers such as Bell and Sikorsky will include the system on new-build aircraft.
Potential sales are projected at DM250 million a year, mostly from the retrofit market. "We will be really penetrating the market from 2004," says Langer. He believes the project can reach break-even by 2006.
Full-scale development work is to get under way from September when the new company will establish its headquarters at Altenburg in eastern Germany.
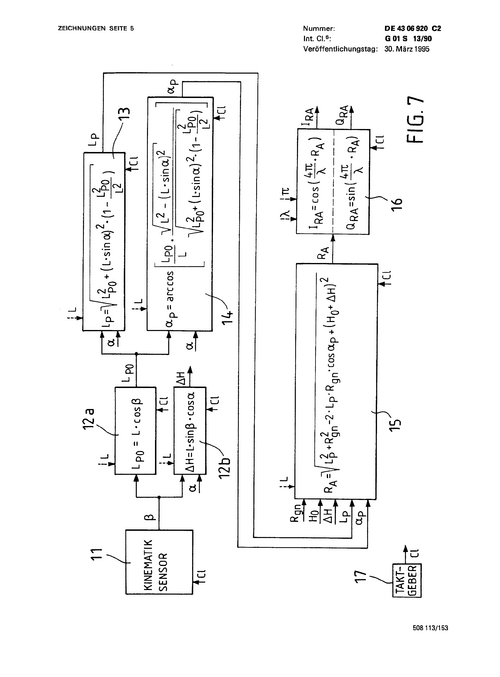
The real-time signal processing element will require an array of processors from Eonic Systems capable of performing 14 billion operations a second (14 gigaflop), says Langer. A prototype containing 112 processors has been built.
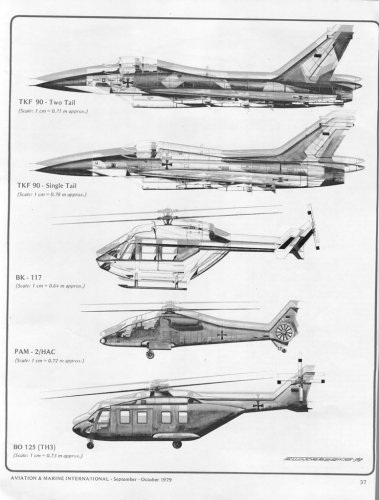
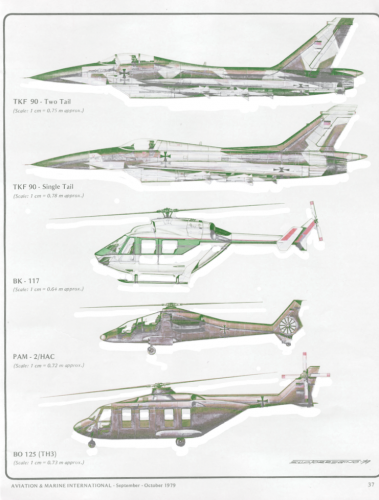
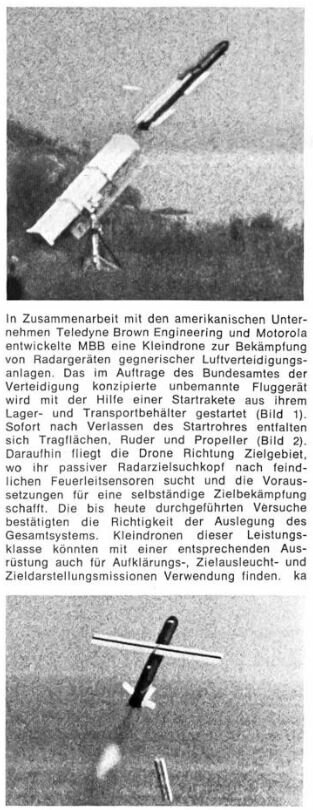
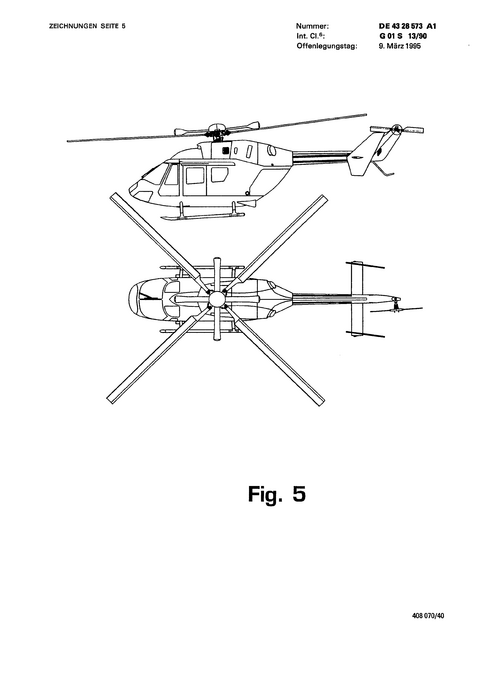
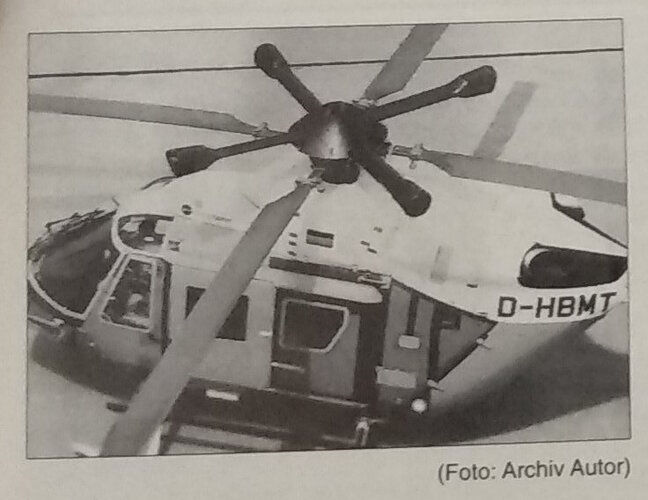
The radar antennae, each around 1.3m in length, are mounted between each blade and rotate at the same speed as the main rotor. A mock-up has already been flight tested on a BK117 helicopter.
HeliRadar Technologies is expected to be renamed 3DRadar Vision later this year.